

High-throughput end-to-end aphid honeydew excretion behavior recognition method based on rapid adaptive motion-feature fusion
- PMID: 40692669
- PMCID: PMC12277367
- DOI: 10.3389/fpls.2025.1609222
High-throughput end-to-end aphid honeydew excretion behavior recognition method based on rapid adaptive motion-feature fusion
Abstract
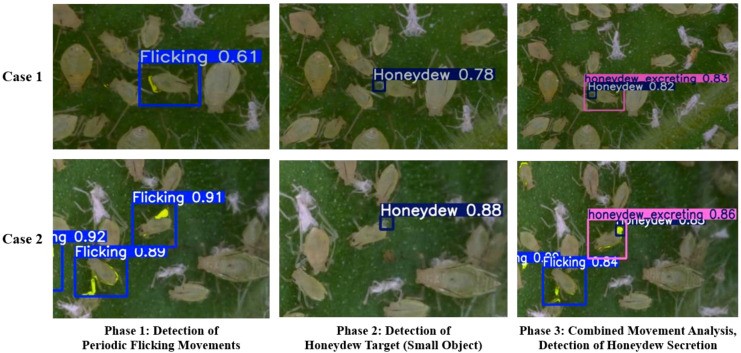
Introduction: Aphids are significant agricultural pests and vectors of plant viruses. Their Honeydew Excretion(HE) behavior holds critical importance for investigating feeding activities and evaluating plant resistance levels. Addressing the challenges of suboptimal efficiency, inadequate real-time capability, and cumbersome operational procedures inherent in conventional manual and chemical detection methodologies, this research introduces an end-to-end multi-target behavior detection framework. This framework integrates spatiotemporal motion features with deep learning architectures to enhance detection accuracy and operational efficacy.
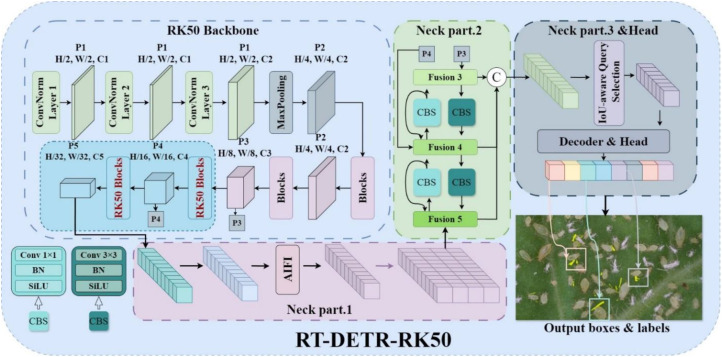
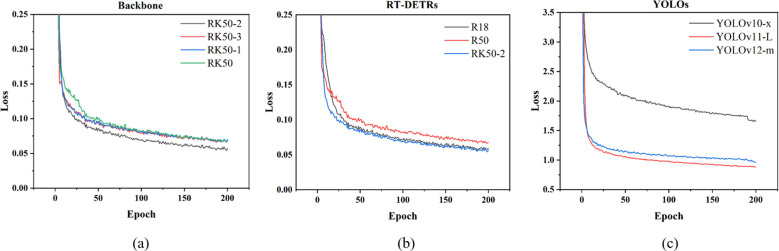
Methods: This study established the first fine-grained dataset encompassing aphid Crawling Locomotion(CL), Leg Flicking(LF), and HE behaviors, offering standardized samples for algorithm training. A rapid adaptive motion feature fusion algorithm was developed to accurately extract high-granularity spatiotemporal motion features. Simultaneously, the RT-DETR detection model underwent deep optimization: a spline-based adaptive nonlinear activation function was introduced, and the Kolmogorov-Arnold network was integrated into the deep feature stage of the ResNet50 backbone network to form the RK50 module. These modifications enhanced the model's capability to capture complex spatial relationships and subtle features.
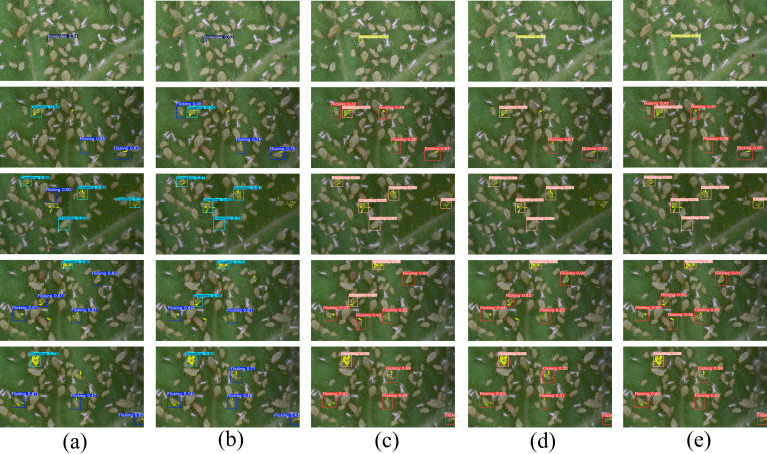
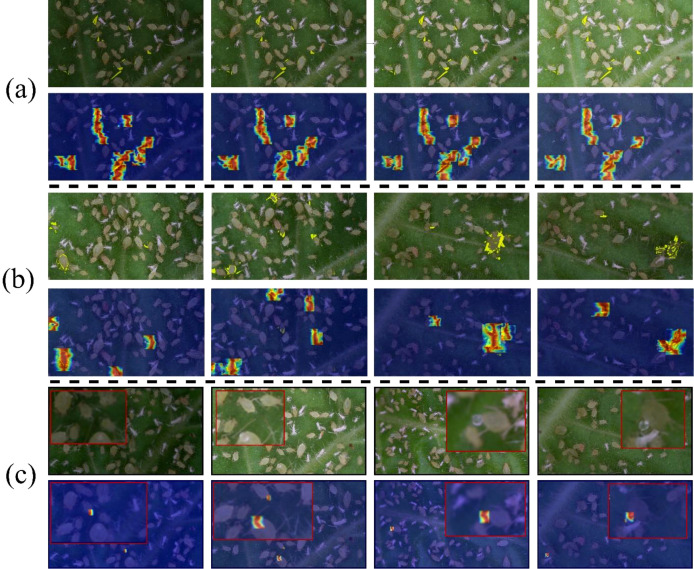
Results and discussion: Experimental results demonstrated that the proposed framework achieved an average precision of 85.9%. Compared with the model excluding the RK50 module, the mAP50 improved by 2.9%, and its performance in detecting small-target honeydew significantly surpassed mainstream algorithms. This study presents an innovative solution for automated monitoring of aphids' fine-grained behaviors and provides a reference for insect behavior recognition research. The datasets, codes, and model weights were made available on GitHub (https://github.com/kuieless/RAMF-Aphid-Honeydew-Excretion-Behavior-Recognition).
Keywords: Kolmogorov-Arnold networks; RT-DETR-RK50; aphid behavior recognition; honeydew excretion detection; rapid adaptive motion feature fusion.
Copyright © 2025 Song, Shen, Liu, Zhang, Ren, Yang, Li, Liu, Yan, Li, Xing and Wu.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures


Similar articles
-
An improved YOLOv5 method for accurate recognition of grazing sheep activities: active, inactive, ruminating behaviors.J Anim Sci. 2025 Jan 4;103:skaf084. doi: 10.1093/jas/skaf084. J Anim Sci. 2025. PMID: 40259470
-
A dual-domain perception gate-controlled adaptive fusion algorithm for road crack detection.Sci Rep. 2025 Jul 1;15(1):21485. doi: 10.1038/s41598-025-07610-5. Sci Rep. 2025. PMID: 40595250 Free PMC article.
-
EDT-MCFEF: a multi-channel feature fusion model for emergency department triage of medical texts.Front Public Health. 2025 Jun 18;13:1591491. doi: 10.3389/fpubh.2025.1591491. eCollection 2025. Front Public Health. 2025. PMID: 40606112 Free PMC article.
-
The measurement and monitoring of surgical adverse events.Health Technol Assess. 2001;5(22):1-194. doi: 10.3310/hta5220. Health Technol Assess. 2001. PMID: 11532239
-
Automated devices for identifying peripheral arterial disease in people with leg ulceration: an evidence synthesis and cost-effectiveness analysis.Health Technol Assess. 2024 Aug;28(37):1-158. doi: 10.3310/TWCG3912. Health Technol Assess. 2024. PMID: 39186036 Free PMC article.
References
-
- Aharon N., Orfaig R., Bobrovsky B. Z. (2022). Bot-sort: Robust associations multi-pedestrian tracking. arXiv preprint arXiv 2206, 14651. doi: 10.48550/arXiv.2206.14651 - DOI
-
- Ahmed M. M., Hassanien E. E., Hassanien A. E. (2024). A smart IoT-based monitoring system in poultry farms using chicken behavioral analysis. Internet Things 25, 101010. doi: 10.1016/j.iot.2023.101010 - DOI
-
- Carion N., Massa F., Synnaeve G., Usunier N., Kirillov A., Zagoruyko S. (2020). “End-to-end object detection with transformers,” in European conference on computer vision (Springer International Publishing, Cham: ), 213–229. doi: 10.1007/978-3-030-58452-8_13 - DOI
-
- Chattopadhay A., Sarkar A., Howlader P., Balasubramanian V. N. (2018). “Grad-cam++: Generalized gradient-based visual explanations for deep convolutional networks,” in 2018 IEEE winter conference on applications of computer vision (WACV) (Lake Tahoe, NV, USA: IEEE; ), 839–847. doi: 10.1109/WACV.2018.00097 - DOI
LinkOut - more resources
Full Text Sources