

Using Adaptive Surrogate Models to Accelerate Multi-Objective Design Optimization of MEMS
- PMID: 40731662
- PMCID: PMC12298632
- DOI: 10.3390/mi16070753
Using Adaptive Surrogate Models to Accelerate Multi-Objective Design Optimization of MEMS
Abstract
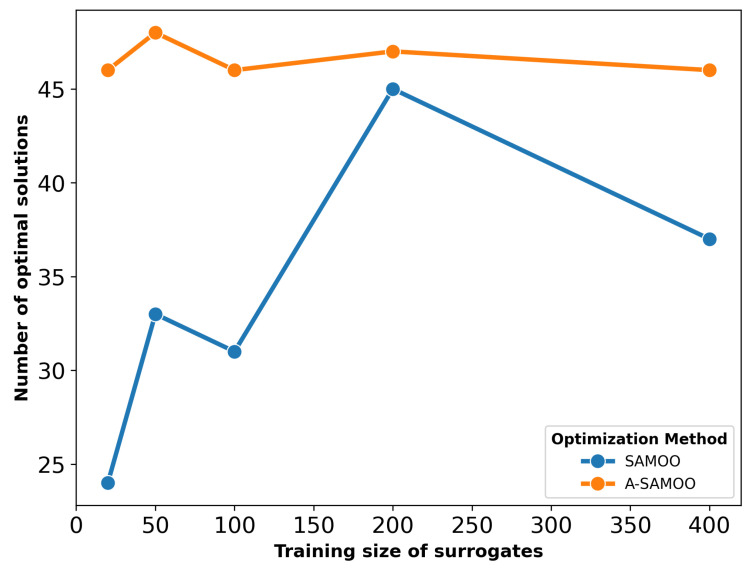
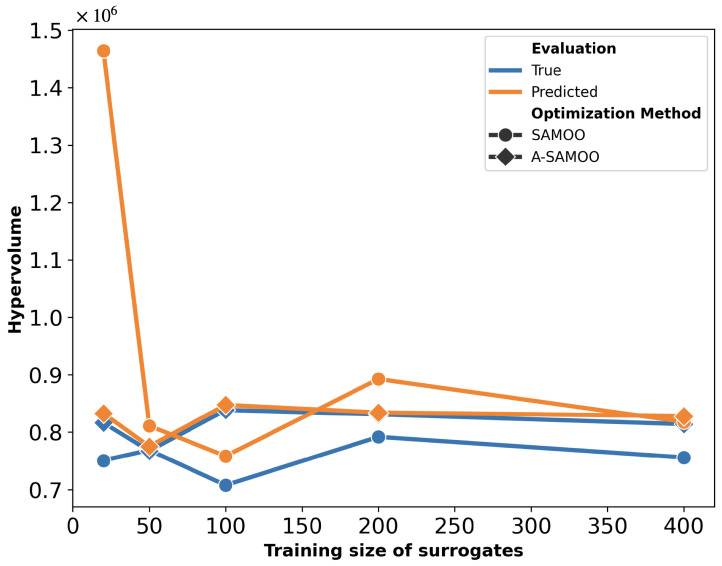
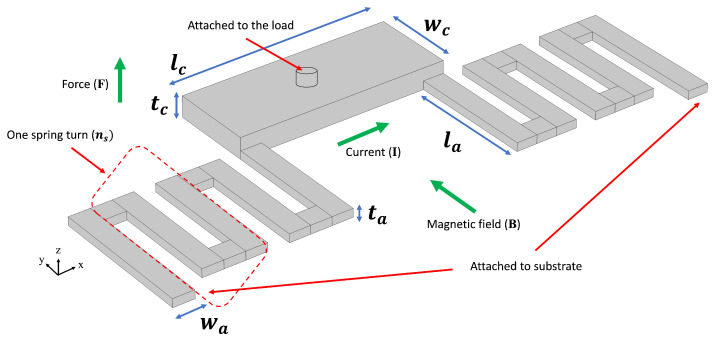
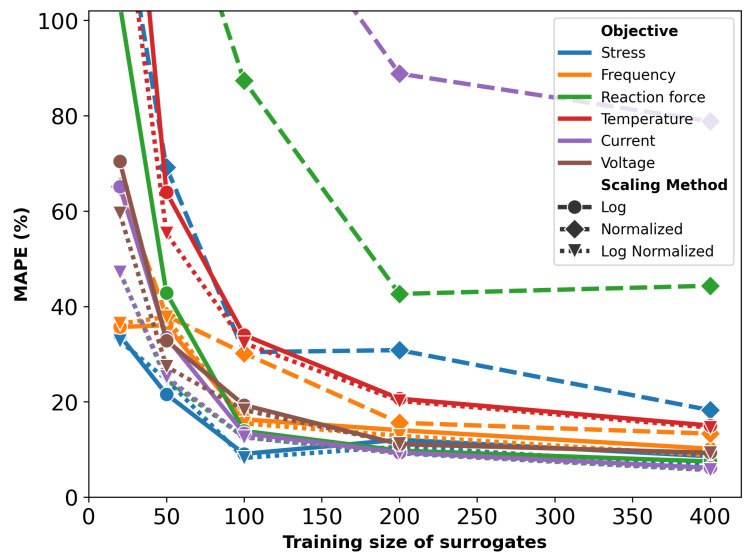
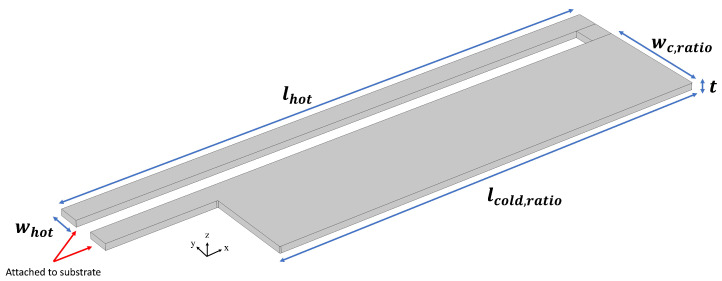
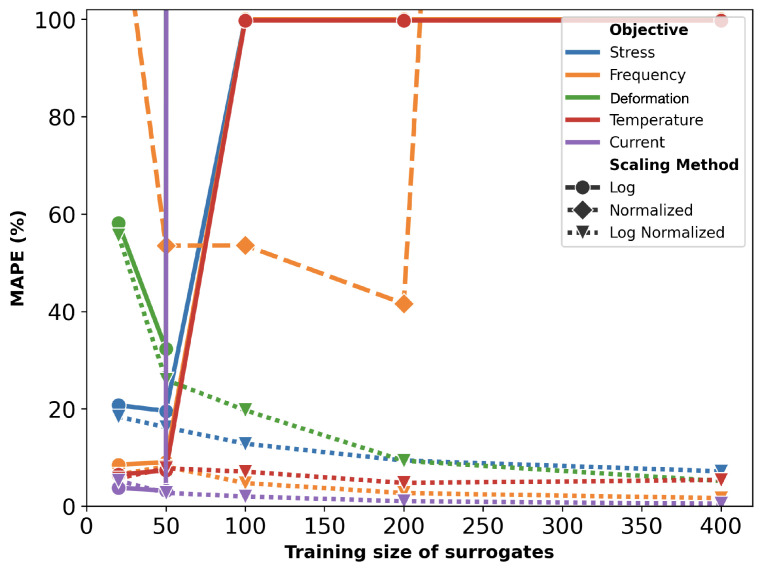
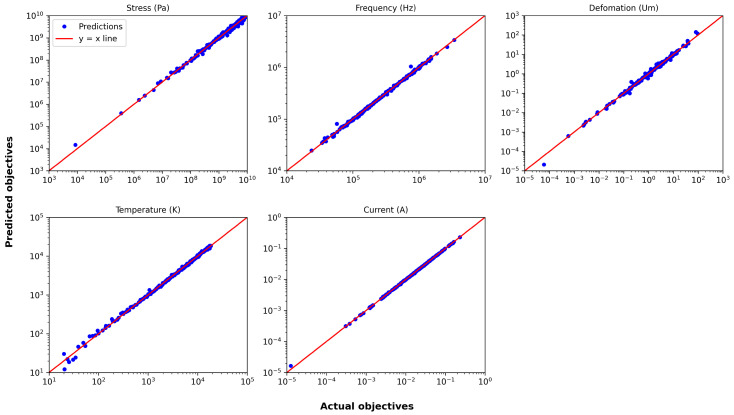
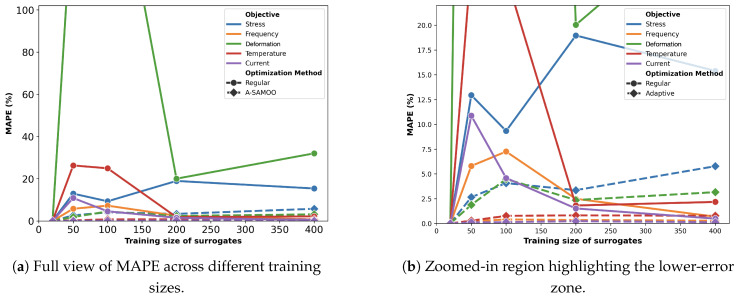
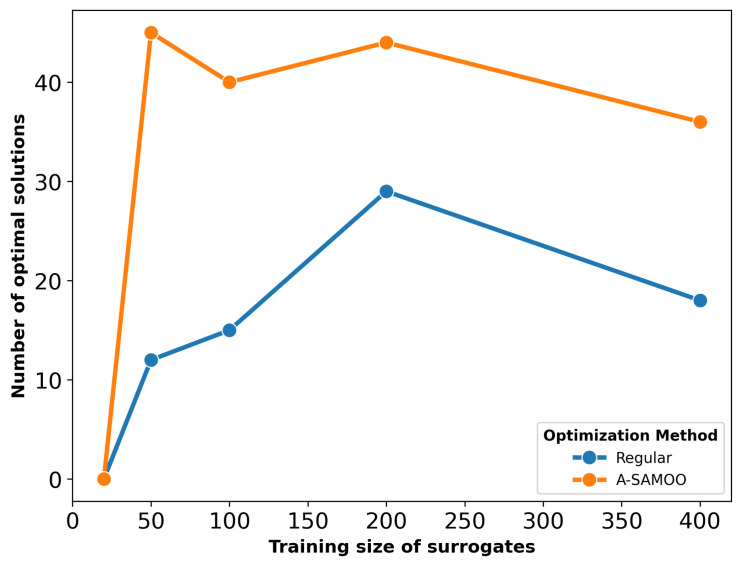
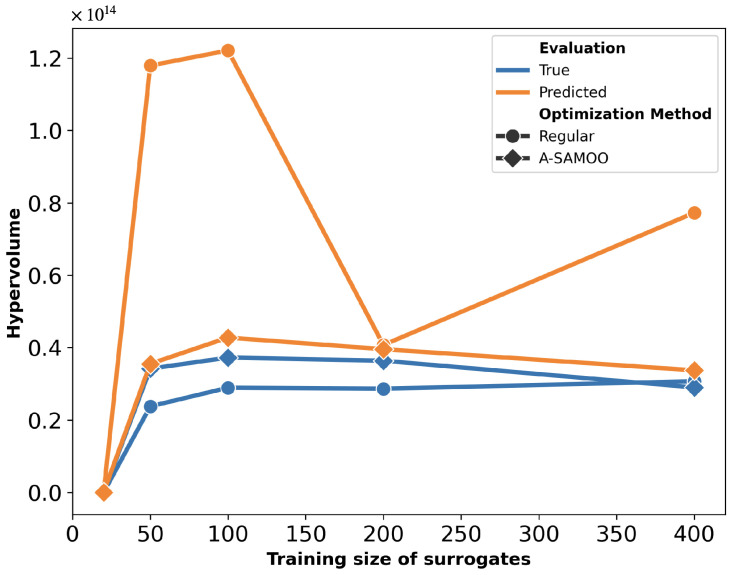
This study presents a comprehensive multi-objective optimization framework specifically designed for micro-electromechanical systems (MEMS). The framework integrates both traditional and adaptive optimization techniques, named Surrogate-Assisted Multi-Objective Optimization (SAMOO) and Adaptive-SAMOO (A-SAMOO), respectively. By addressing key limitations of traditional approaches, such as the consideration of objective constraints and the provision of multiple design options, the proposed framework enhances both flexibility and practical applicability. Results show that adaptive optimization outperforms traditional offline methods by delivering a greater number and higher quality of optimal solutions while requiring fewer finite element method simulations. The adaptive approach showed a significant advantage by attaining high-quality solutions while requiring only 2.8% of the finite element method (FEM) evaluations compared to traditional methods that do not incorporate surrogate models. This performance boost highlights the advantages of online learning in enhancing the accuracy, speed, and diversity of solutions in MEMS optimization. These optimization schemes were tested on multiple MEMS devices with varying physics and complexities, specifically the U-shaped Lorentz force actuator, serpentine Lorentz force actuator, and thermal actuator. The results highlight the robustness and versatility of the proposed methods, particularly in addressing cases involving discrete design variables and strict objective constraints. This comprehensive, step-by-step framework serves as a valuable resource for researchers and practitioners aiming to optimize MEMS designs from the ground up, providing a reliable and effective approach to multi-objective optimization in MEMS applications.
Keywords: Gaussian process regression; Lorentz force actuator; MEMS; design optimization; finite element method; multi-objective optimization; online learning; surrogate modeling; thermal actuator.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures
Similar articles
-
Wood Waste Valorization and Classification Approaches: A systematic review.Open Res Eur. 2025 May 6;5:5. doi: 10.12688/openreseurope.18862.2. eCollection 2025. Open Res Eur. 2025. PMID: 40438563 Free PMC article.
-
Eliciting adverse effects data from participants in clinical trials.Cochrane Database Syst Rev. 2018 Jan 16;1(1):MR000039. doi: 10.1002/14651858.MR000039.pub2. Cochrane Database Syst Rev. 2018. PMID: 29372930 Free PMC article.
-
Accreditation through the eyes of nurse managers: an infinite staircase or a phenomenon that evaporates like water.J Health Organ Manag. 2025 Jun 30. doi: 10.1108/JHOM-01-2025-0029. Online ahead of print. J Health Organ Manag. 2025. PMID: 40574247
-
Life cycle assessment and multicriteria decision making analysis of additive manufacturing processes towards optimal performance and sustainability.Sci Rep. 2025 Jul 11;15(1):25167. doi: 10.1038/s41598-025-92025-5. Sci Rep. 2025. PMID: 40646116 Free PMC article.
-
Leveraging a foundation model zoo for cell similarity search in oncological microscopy across devices.Front Oncol. 2025 Jun 18;15:1480384. doi: 10.3389/fonc.2025.1480384. eCollection 2025. Front Oncol. 2025. PMID: 40606969 Free PMC article.
References
-
- Mohd Ghazali F.A., Hasan M.N., Rehman T., Nafea M., Mohamed Ali M.S., Takahata K. MEMS Actuators for Biomedical Applications: A Review. J. Micromech. Microeng. 2020;30:073001. doi: 10.1088/1361-6439/ab8832. - DOI
-
- Honda W., Harada S., Arie T., Akita S., Takei K. Wearable, Human-Interactive, Health-Monitoring, Wireless Devices Fabricated by Macroscale Printing Techniques. Adv. Funct. Mater. 2014;24:3299–3304. doi: 10.1002/adfm.201303874. - DOI
-
- Holmstrom S.T.S., Baran U., Urey H. MEMS Laser Scanners: A Review. J. Microelectromech. Syst. 2014;23:259–275. doi: 10.1109/JMEMS.2013.2295470. - DOI
-
- Atia M.M., Liu S., Nematallah H., Karamat T.B., Noureldin A. Integrated Indoor Navigation System for Ground Vehicles With Automatic 3-D Alignment and Position Initialization. IEEE Trans. Veh. Technol. 2015;64:1279–1292. doi: 10.1109/TVT.2015.2397004. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
