

Micro-spring force sensors using conductive photosensitive resin fabricated via two-photon polymerization
- PMID: 40790014
- PMCID: PMC12339963
- DOI: 10.1038/s41378-025-00975-7
Micro-spring force sensors using conductive photosensitive resin fabricated via two-photon polymerization
Abstract
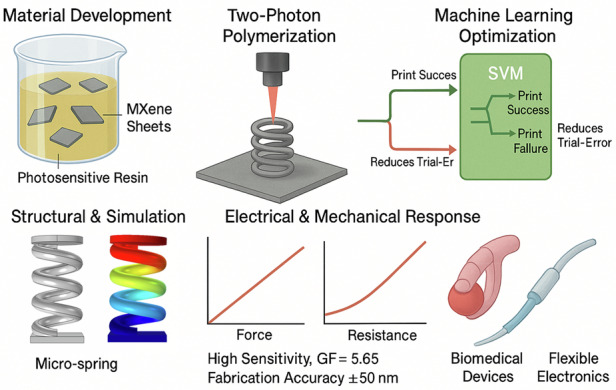
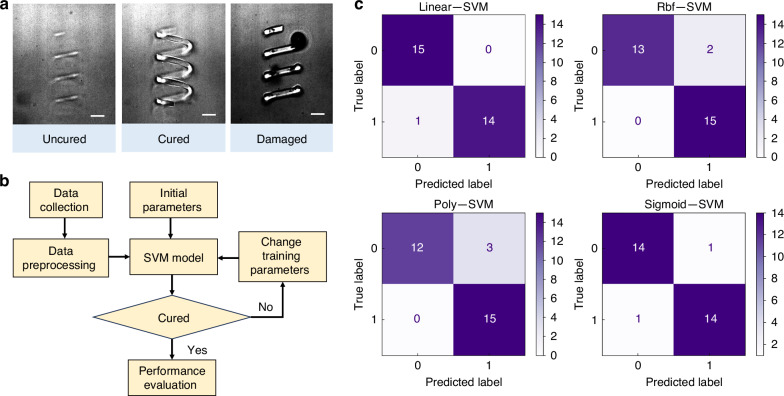
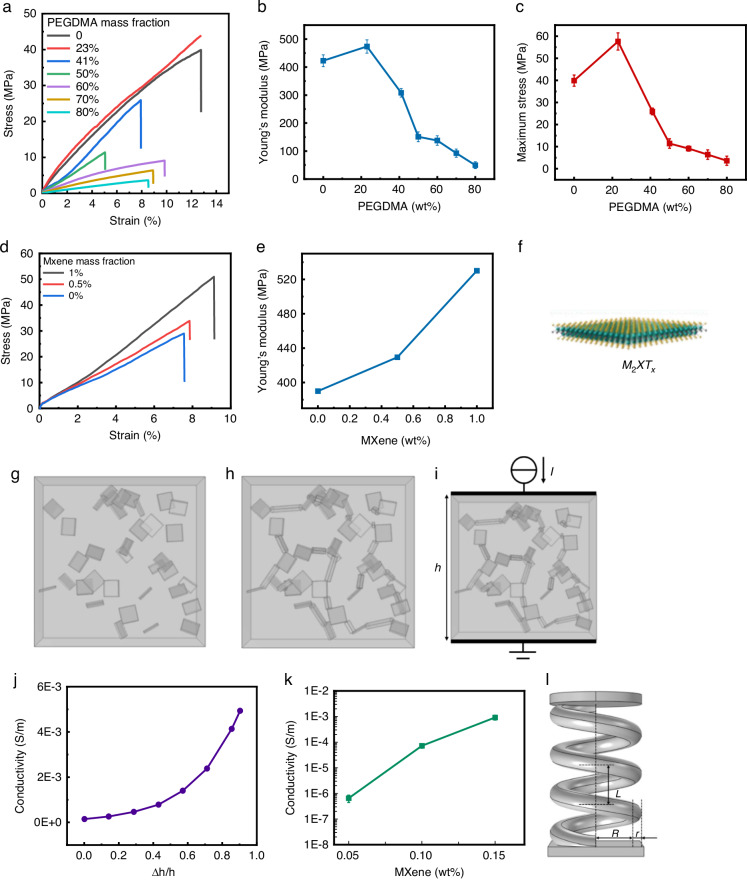
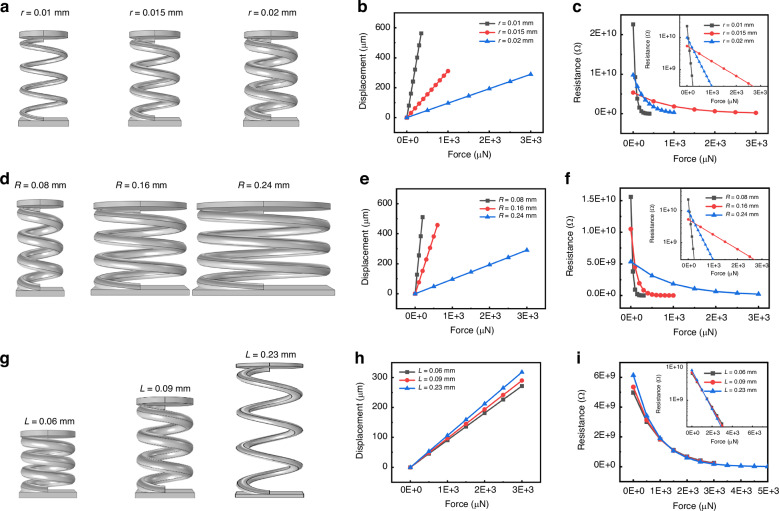
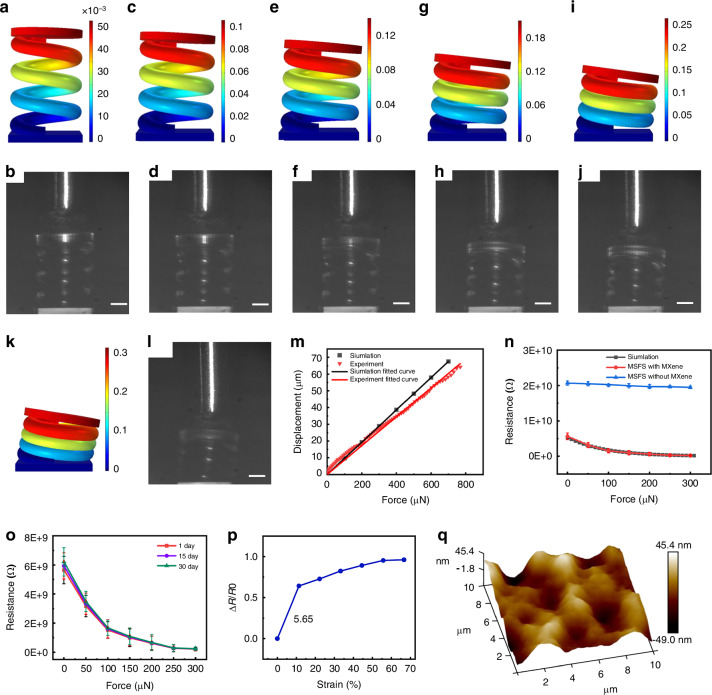
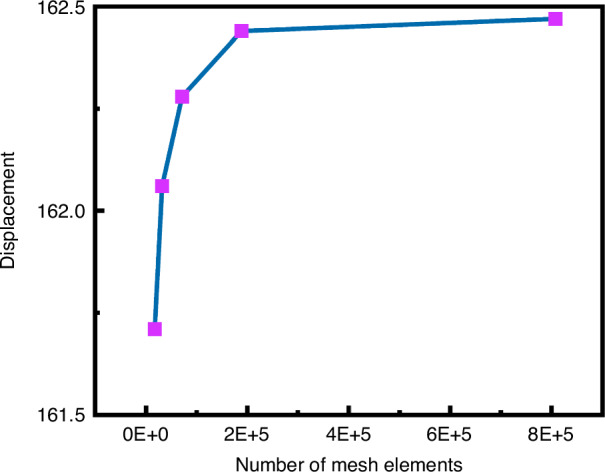
The rapid miniaturization of electronic devices has fueled unprecedented demand for flexible, high-performance sensors across fields ranging from medical devices to robotics. Despite advances in fabrication techniques, the development of micro- and nano-scale flexible force sensors with superior sensitivity, stability, and biocompatibility remains a formidable challenge. In this study, we developed a novel conductive photosensitive resin specifically designed for two-photon polymerization, systematically optimized its printing parameters, and improved its structural design, thereby enabling the fabrication of high-precision micro-spring force sensors (MSFS). The proposed photosensitive resin, doped with MXene nanomaterials, combines exceptional mechanical strength and conductivity, overcoming limitations of traditional materials. Using a support vector machine model in machine learning techniques, we optimized the polymerizability of the resin under varied laser parameters, achieving a predictive accuracy of 92.66%. This model significantly reduced trial-and-error in the TPP process, accelerating the discovery of ideal fabrication conditions. Finite element analysis was employed to design and simulate the performance of the MSFS, guiding structural optimization to achieve high sensitivity and mechanical stability. The fabricated MSFS demonstrated outstanding electromechanical performance, with a sensitivity coefficient of 5.65 and a fabrication accuracy within ±50 nm, setting a new standard for MSFS precision. This work not only pushes the boundaries of sensor miniaturization but also introduces a scalable, efficient pathway for the rapid design and fabrication of high-performance flexible sensors. The development of flexible, high-performance microscale force sensors remains a critical challenge for next-generation biomedical and wearable electronics. Here, we report a novel micro-spring force sensor fabricated via two-photon polymerization using a custom-designed conductive photosensitive resin doped with MXene nanosheets. The resin formulation was optimized to balance mechanical strength and electrical conductivity while ensuring high-resolution printability. To accelerate parameter optimization, a support vector machine model was trained to predict polymerization outcomes based on laser conditions and material compositions, achieving a prediction accuracy of 92.66%. Finite element analysis guided the design of the MSFS structure, enabling tunable electromechanical performance. The fabricated MSFS exhibited excellent sensitivity high fabrication precision and long-term stability. These results demonstrate the potential of integrating machine learning, functional nanomaterials, and TPP microfabrication to enable scalable, high-precision production of intelligent microsensors for biomedical and soft robotic applications.
© 2025. The Author(s).
Conflict of interest statement
Conflict of interest: The authors declare no competing interests.
Figures
Similar articles
-
Dual-Mode Silver Itaconate Conductive Ink: Bridging Ultra-Precise Electronics and Flexible Sensors via Tunable Decomposition Pathways.Langmuir. 2025 Jul 1;41(25):16477-16489. doi: 10.1021/acs.langmuir.5c01827. Epub 2025 Jun 14. Langmuir. 2025. PMID: 40515708
-
Flexible and Anisotropic Large-Area Piezoresistive Films for High Spatial Resolution Pressure Mapping.ACS Appl Mater Interfaces. 2025 Jun 18;17(24):36148-36169. doi: 10.1021/acsami.5c03350. Epub 2025 Jun 7. ACS Appl Mater Interfaces. 2025. PMID: 40481768
-
Electrospinning Superhydrophobic Flexible Wearable Sensor of CPU@MXene@SiO2 with High Sensing Sensitivity.ACS Appl Mater Interfaces. 2025 Aug 6;17(31):45099-45112. doi: 10.1021/acsami.5c07980. Epub 2025 Jul 24. ACS Appl Mater Interfaces. 2025. PMID: 40702977
-
Management of urinary stones by experts in stone disease (ESD 2025).Arch Ital Urol Androl. 2025 Jun 30;97(2):14085. doi: 10.4081/aiua.2025.14085. Epub 2025 Jun 30. Arch Ital Urol Androl. 2025. PMID: 40583613 Review.
-
Advancements in MXene-based composites for electronic skins.J Mater Chem B. 2024 Jan 24;12(4):895-915. doi: 10.1039/d3tb02247a. J Mater Chem B. 2024. PMID: 38194290 Review.
References
-
- Wan, Y., Wang, Y. & Guo, C. F. Recent progresses on flexible tactile sensors. Mater. Today Phys.1, 61–73 (2017).
-
- Lai, Y. C. et al. Actively perceiving and responsive soft robots enabled by self-powered, highly extensible, and highly sensitive triboelectric proximity- and pressure-sensing skins. Adv. Mater.30, e1801114 (2018). - PubMed
-
- Xu, K., Lu, Y. & Takei, K. Multifunctional skin-inspired flexible sensor systems for wearable electronics. Adv. Mater. Technol.4, 1800628 (2019).
-
- Liu, Y., Pharr, M. & Salvatore, G. A. Lab-on-skin: a review of flexible and stretchable electronics for wearable health monitoring. ACS Nano11, 9614–9635 (2017). - PubMed
-
- Trung, T. Q. & Lee, N.-E. Flexible and stretchable physical sensor integrated platforms for wearable human-activity monitoringand personal healthcare. Adv. Mater.28, 4338–4372 (2016). - PubMed
LinkOut - more resources
Full Text Sources