

Neuromorphic computing for robotic vision: algorithms to hardware advances
- PMID: 40804110
- PMCID: PMC12350809
- DOI: 10.1038/s44172-025-00492-5
Neuromorphic computing for robotic vision: algorithms to hardware advances
Abstract
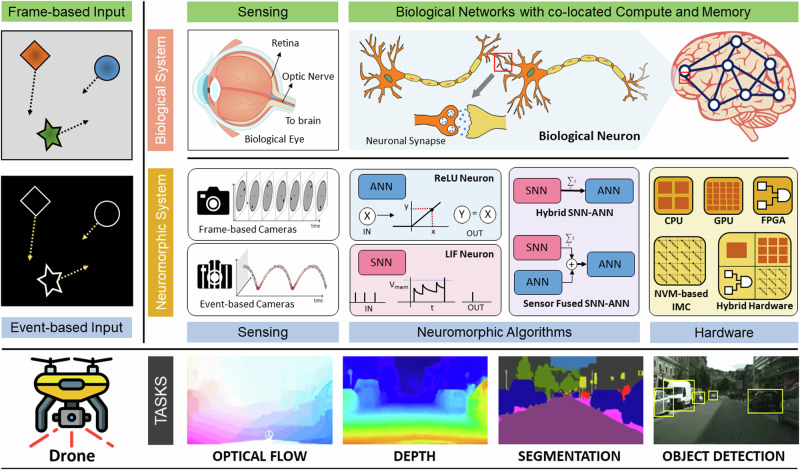
Neuromorphic computing offers transformative potential for AI in resource-constrained environments by mimicking biological neural efficiency. This perspective article analyzes recent advances and future directions, advocating a system design approach that integrates specialized sensing (e.g., event-based cameras), brain-inspired algorithms (SNNs and SNN-ANN hybrids), and dedicated neuromorphic hardware. Using vision-based drone navigation (VDN) as an exemplar-drawing parallels with biological systems like Drosophila-we demonstrate how these components enable event-driven processing and overcome von Neumann architecture limitations through near-/in-memory computing. Key challenges include large-scale integration, benchmarking standardization, and algorithm-hardware co-design for emerging applications, which we discuss alongside current and future research directions.
© 2025. The Author(s).
Conflict of interest statement
Competing interests: The authors declare no competing interests.
Figures


References
-
- Li, D., Chen, X., Becchi, M. & Zong, Z. Evaluating the energy efficiency of deep convolutional neural networks on cpus and gpus. In 2016 IEEE international conferences on big data and cloud computing (BDCloud), social computing and networking (SocialCom), sustainable computing and communications (SustainCom)(BDCloud-SocialCom-SustainCom), 477–484 (IEEE, 2016).
-
- Gholami, A. et al. A survey of quantization methods for efficient neural network inference. Low-power computer vision. Chapman and Hall/CRC, 291–326 (2022).
-
- Liang, T., Glossner, J., Wang, L., Shi, S. & Zhang, X. Pruning and quantization for deep neural network acceleration: A survey. Neurocomputing461, 370–403 (2021).
-
- Howard, A. et al. Searching for mobilenetv3. In Proceedings of the IEEE/CVF international conference on computer vision, 1314–1324 (2019).
Publication types
LinkOut - more resources
Full Text Sources