

Adaptive Covariance Matrix for UAV-Based Visual-Inertial Navigation Systems Using Gaussian Formulas
- PMID: 40807910
- PMCID: PMC12349106
- DOI: 10.3390/s25154745
Adaptive Covariance Matrix for UAV-Based Visual-Inertial Navigation Systems Using Gaussian Formulas
Abstract
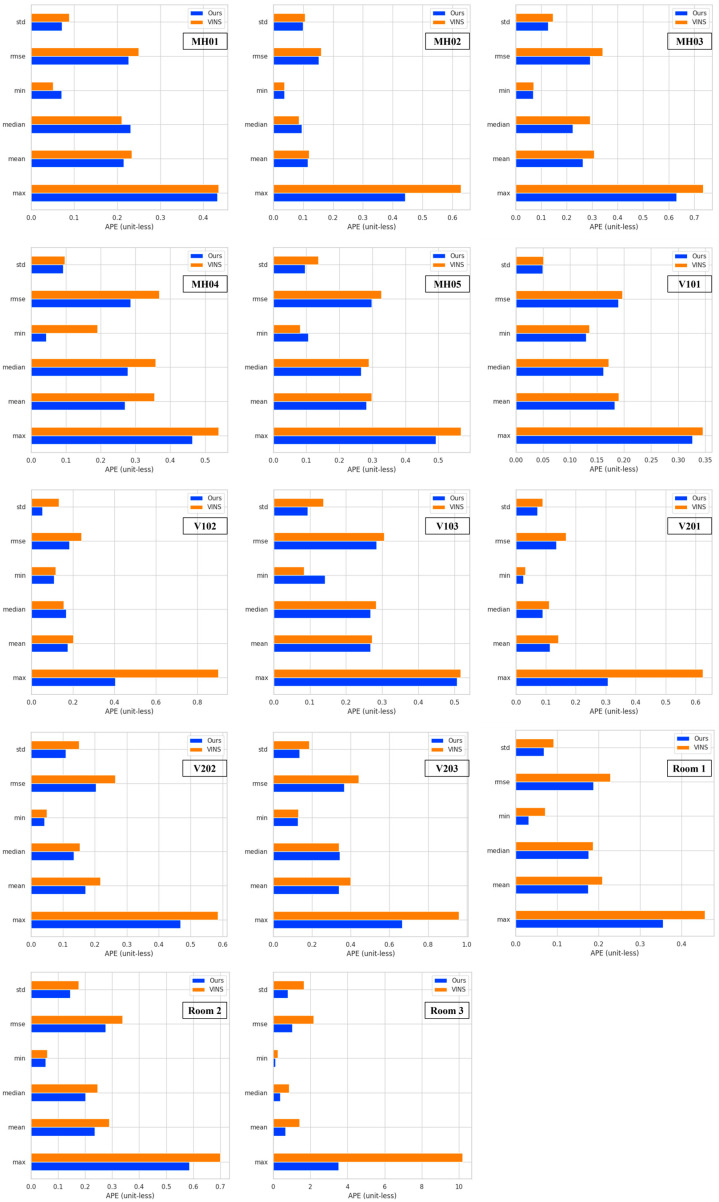
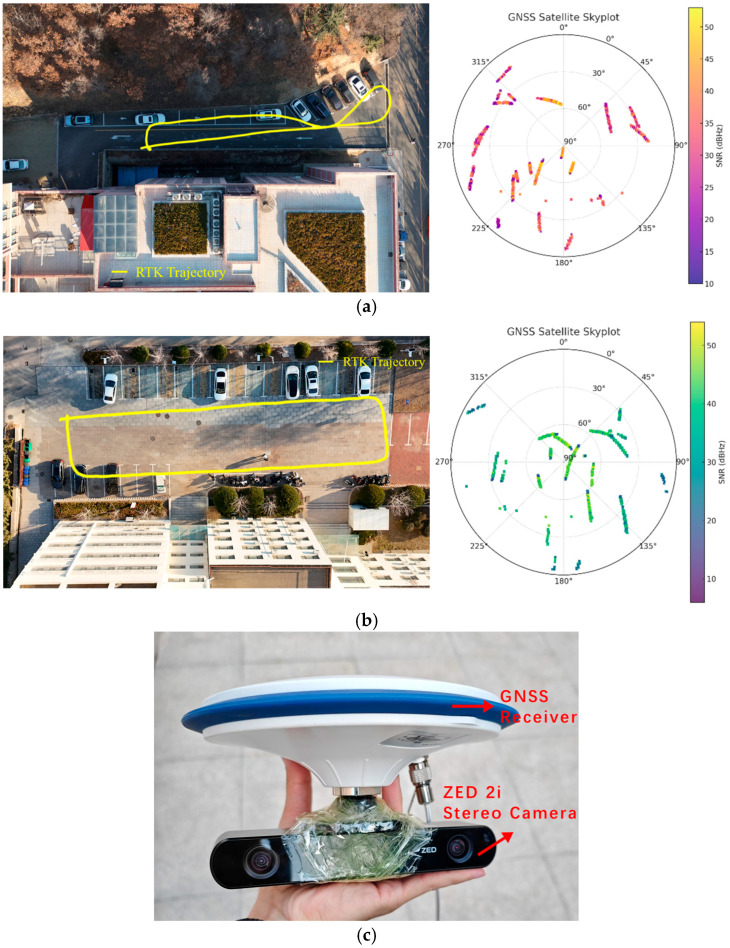
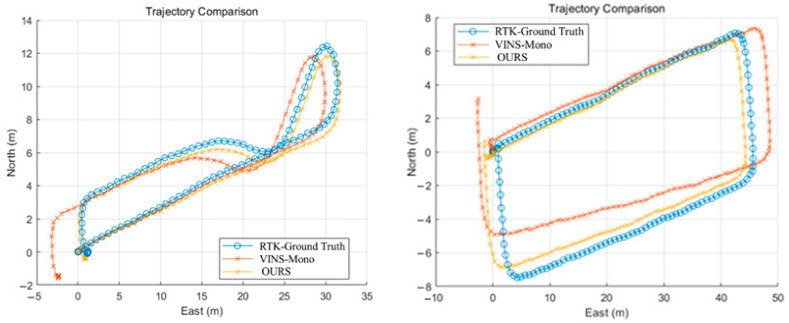
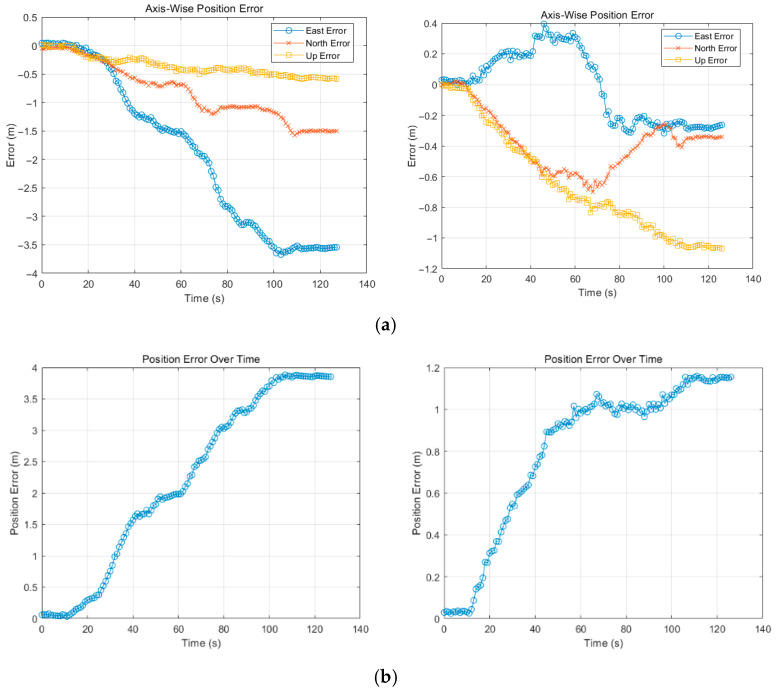
In a variety of UAV applications, visual-inertial navigation systems (VINSs) play a crucial role in providing accurate positioning and navigation solutions. However, traditional VINS struggle to adapt flexibly to varying environmental conditions due to fixed covariance matrix settings. This limitation becomes especially acute during high-speed drone operations, where motion blur and fluctuating image clarity can significantly compromise navigation accuracy and system robustness. To address these issues, we propose an innovative adaptive covariance matrix estimation method for UAV-based VINS using Gaussian formulas. Our approach enhances the accuracy and robustness of the navigation system by dynamically adjusting the covariance matrix according to the quality of the images. Leveraging the advanced Laplacian operator, detailed assessments of image blur are performed, thereby achieving precise perception of image quality. Based on these assessments, a novel mechanism is introduced for dynamically adjusting the visual covariance matrix using a Gaussian model according to the clarity of images in the current environment. Extensive simulation experiments across the EuRoC and TUM VI datasets, as well as the field tests, have validated our method, demonstrating significant improvements in navigation accuracy of drones in scenarios with motion blur. Our algorithm has shown significantly higher accuracy compared to the famous VINS-Mono framework, outperforming it by 18.18% on average, as well as the optimization rate of RMS, which reaches 65.66% for the F1 dataset and 41.74% for F2 in the field tests outdoors.
Keywords: adaptive covariance matrix; drones/UAV; image quality assessment; motion blur; visual–inertial navigation system.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Integrated neural network framework for multi-object detection and recognition using UAV imagery.Front Neurorobot. 2025 Jul 30;19:1643011. doi: 10.3389/fnbot.2025.1643011. eCollection 2025. Front Neurorobot. 2025. PMID: 40809070 Free PMC article.
-
Prescription of Controlled Substances: Benefits and Risks.2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. 2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. PMID: 30726003 Free Books & Documents.
-
Leveraging a foundation model zoo for cell similarity search in oncological microscopy across devices.Front Oncol. 2025 Jun 18;15:1480384. doi: 10.3389/fonc.2025.1480384. eCollection 2025. Front Oncol. 2025. PMID: 40606969 Free PMC article.
-
Management of urinary stones by experts in stone disease (ESD 2025).Arch Ital Urol Androl. 2025 Jun 30;97(2):14085. doi: 10.4081/aiua.2025.14085. Epub 2025 Jun 30. Arch Ital Urol Androl. 2025. PMID: 40583613 Review.
-
Are There Differences in Accuracy or Outcomes Scores Among Navigated, Robotic, Patient-specific Instruments or Standard Cutting Guides in TKA? A Network Meta-analysis.Clin Orthop Relat Res. 2020 Sep;478(9):2105-2116. doi: 10.1097/CORR.0000000000001324. Clin Orthop Relat Res. 2020. PMID: 32530896 Free PMC article.
References
-
- Tang X., Yang L., Wang D., Li W., Xin D., Jia H. A collaborative navigation algorithm for UAV Ad Hoc network based on improved sequence quadratic programming and unscented Kalman filtering in GNSS denied area. Measurement. 2025;242:115977. doi: 10.1016/j.measurement.2024.115977. - DOI
-
- Li C., Wang J., Liu J., Shan J. Cooperative visual–range–inertial navigation for multiple unmanned aerial vehicles. IEEE Trans. Aerosp. Electron. Syst. 2023;59:7851–7865. doi: 10.1109/TAES.2023.3297555. - DOI
-
- Huang G. Visual-inertial navigation: A concise review; Proceedings of the 2019 International Conference on Robotics and Automation (ICRA); Montreal, QC, Canada. 20–24 May 2019; pp. 9572–9582.
-
- Motlagh N.H., Bagaa M., Taleb T. UAV-based IoT platform: A crowd surveillance use case. IEEE Commun. Mag. 2017;55:128–134. doi: 10.1109/MCOM.2017.1600587CM. - DOI
-
- Bisio I., Garibotto C., Haleem H., Lavagetto F., Sciarrone A. RF/WiFi-based UAV surveillance systems: A systematic literature review. Internet Things. 2024;26:101201. doi: 10.1016/j.iot.2024.101201. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
