Bridging the Gap to Bionic Motion: Challenges in Legged Robot Limb Unit Design, Modeling, and Control
- PMID: 40837868
- PMCID: PMC12364437
- DOI: 10.34133/cbsystems.0365
Bridging the Gap to Bionic Motion: Challenges in Legged Robot Limb Unit Design, Modeling, and Control
Abstract
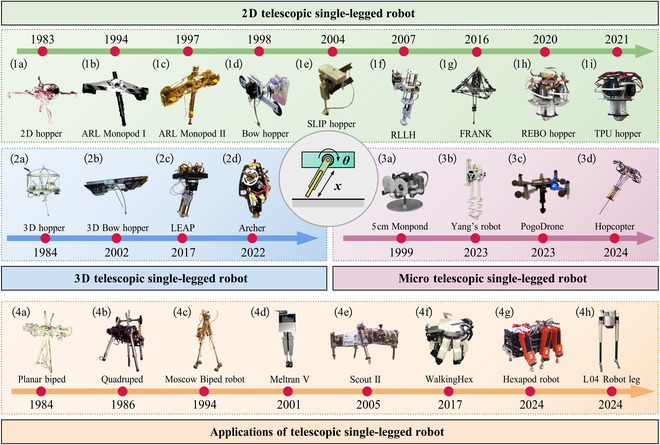
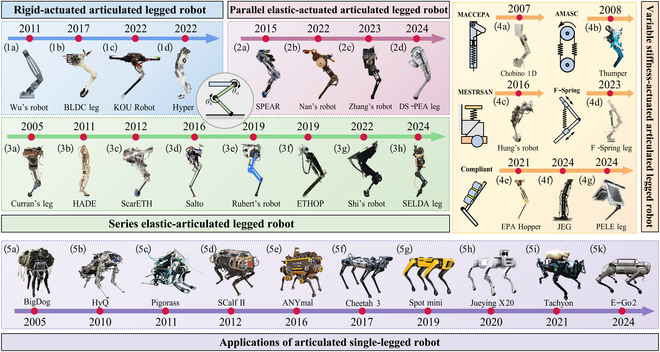
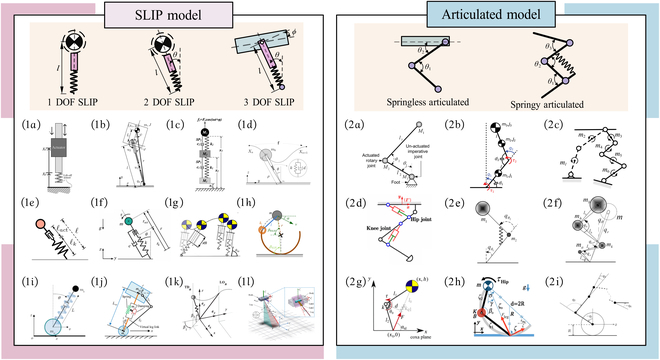
Motivated by the agility of animal and human locomotion, highly dynamic bionic legged robots have been extensively applied across various domains. Legged robotics represents a multidisciplinary field that integrates manufacturing, materials science, electronics, and biology, and other disciplines. Among its core subsystems, the lower limbs are particularly critical, necessitating the integration of structural optimization, advanced modeling techniques, and sophisticated control strategies to fully exploit robots' dynamic performance potential. This paper presents a comprehensive review of recent developments in the structural design of single-legged robots and systematically summarizes prevailing modeling approaches and control strategies. Key challenges and potential future directions are also discussed, serving as a reference for the future application of state-of-the-art manufacturing and control methodologies in legged robotic systems.
Copyright © 2025 Junhui Zhang et al.
Conflict of interest statement
Competing interests: The authors declare that they have no competing interests.
Figures




Similar articles
-
Prescription of Controlled Substances: Benefits and Risks.2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. 2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. PMID: 30726003 Free Books & Documents.
-
Bioinspired Soft Spine Enables Small-Scale Robotic Rat to Conquer Challenging Environments.Soft Robot. 2024 Feb;11(1):70-84. doi: 10.1089/soro.2022.0220. Epub 2023 Jul 21. Soft Robot. 2024. PMID: 37477672
-
CPG-Based Control of an Octopod Biomimetic Machine Lobster for Mining Applications: Design and Implementation in Challenging Underground Environments.Sensors (Basel). 2025 Jul 11;25(14):4331. doi: 10.3390/s25144331. Sensors (Basel). 2025. PMID: 40732459 Free PMC article.
-
Research pathways from tensegrity-related biological structures to tensegrity robots: a bibliometric analysis.Bioinspir Biomim. 2025 Jul 22;20(4). doi: 10.1088/1748-3190/adedec. Bioinspir Biomim. 2025. PMID: 40633561
-
Current status and future directions of robotic single-site surgery: a systematic review.Eur Urol. 2013 Feb;63(2):266-80. doi: 10.1016/j.eururo.2012.08.028. Epub 2012 Aug 23. Eur Urol. 2013. PMID: 22940173
References
-
- Garaffa LC, Basso M, Konzen AA, Freitas EP. Reinforcement learning for mobile robotics exploration: A survey. IEEE Trans Neural Netw Learn Syst. 2021;34(8):3796–3810. - PubMed
-
- Yin K, Gao Y, Gao F, Chen X, Zhao Y, Xiao Y, Sun Q, Sun J. Mechanism design and motion planning of a hexapod curling robot exhibited during the Beijing 2022 winter Olympics games. Engineering. 2024;35:15–31.
-
- Taheri H, Mozayani N. A study on quadruped mobile robots. Mech Mach Theory. 2023;190: Article 105448.
-
- Meng F, Huang Q, Yu Z, Chen X, Fan X, Zhang W, Ming A. Explosive electric actuator and control for legged robots. Engineering. 2022;12:39–47.
Publication types
LinkOut - more resources
Full Text Sources
Miscellaneous