

An improved YOLOv8s-based UAV target detection algorithm
- PMID: 40839710
- PMCID: PMC12370207
- DOI: 10.1371/journal.pone.0327732
An improved YOLOv8s-based UAV target detection algorithm
Abstract
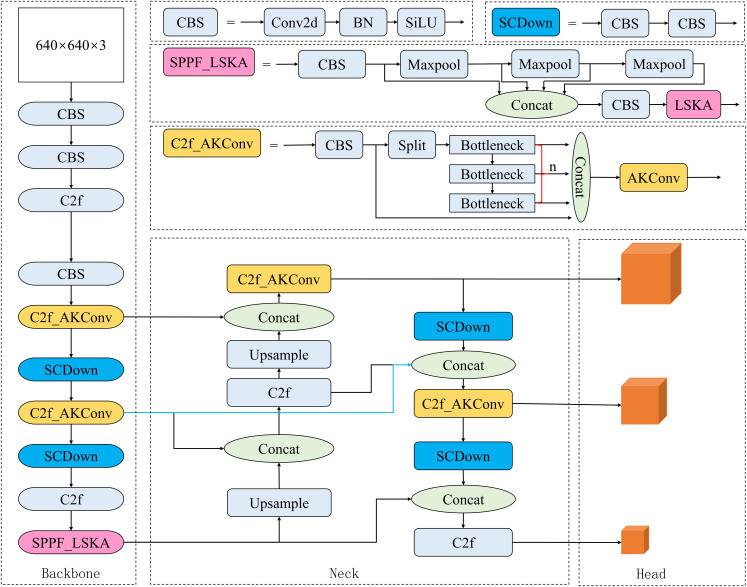
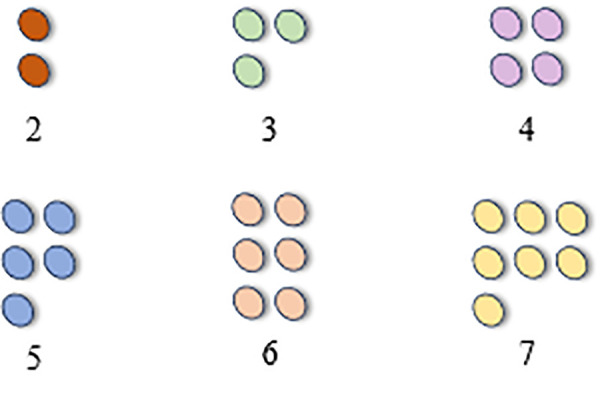
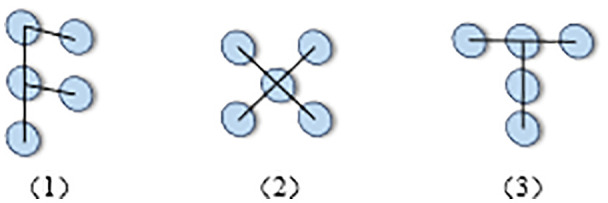
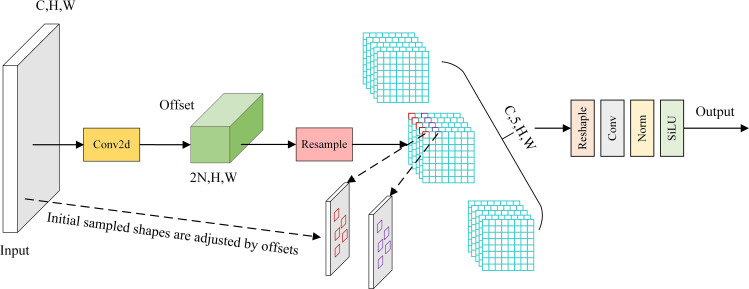
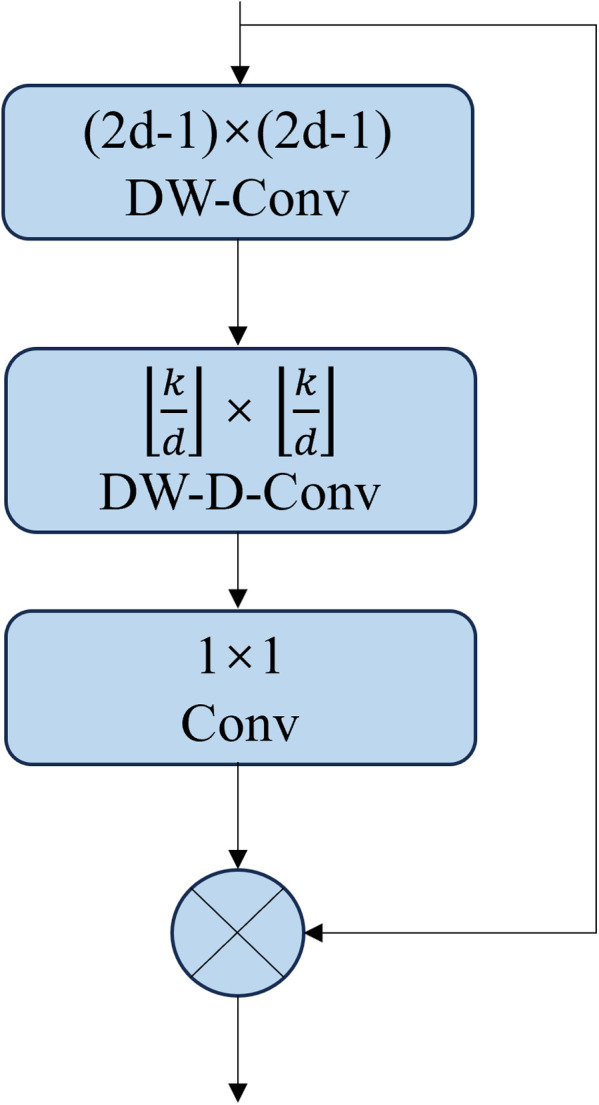
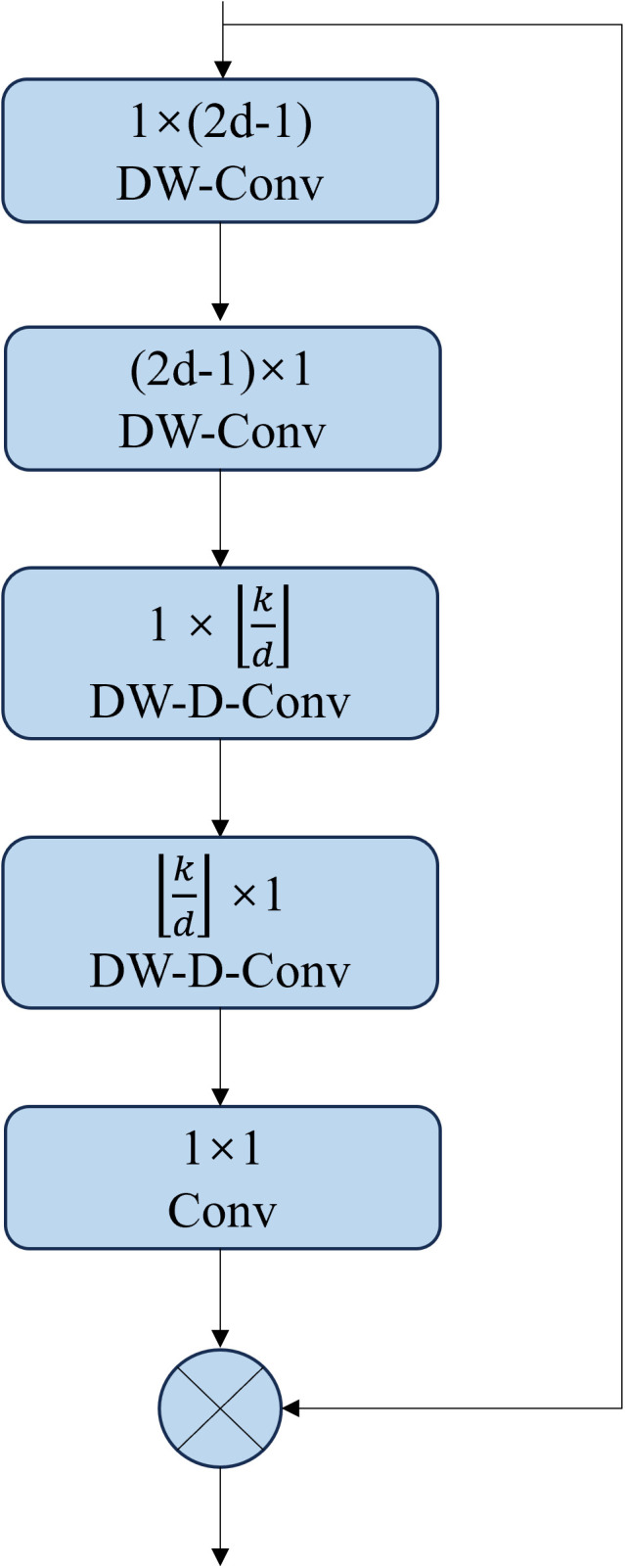
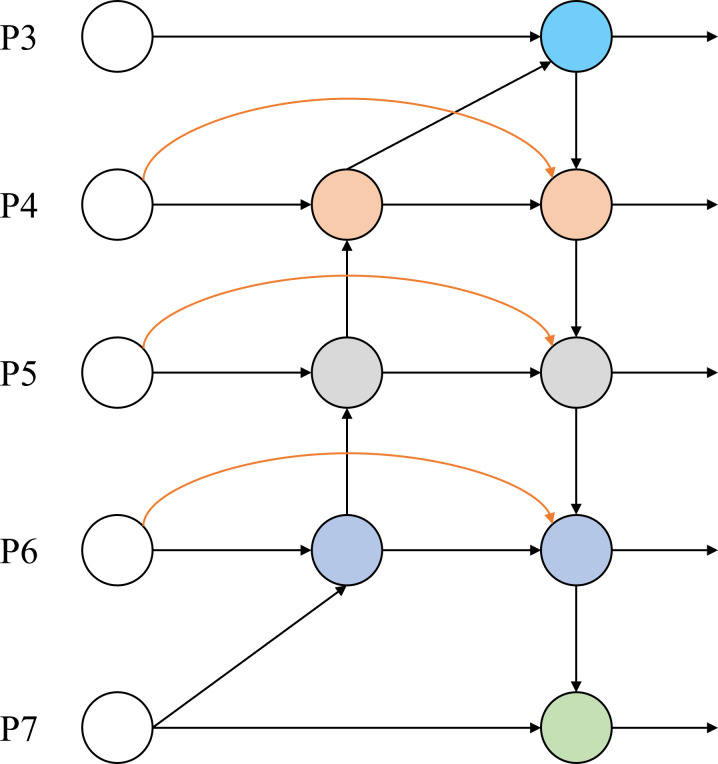
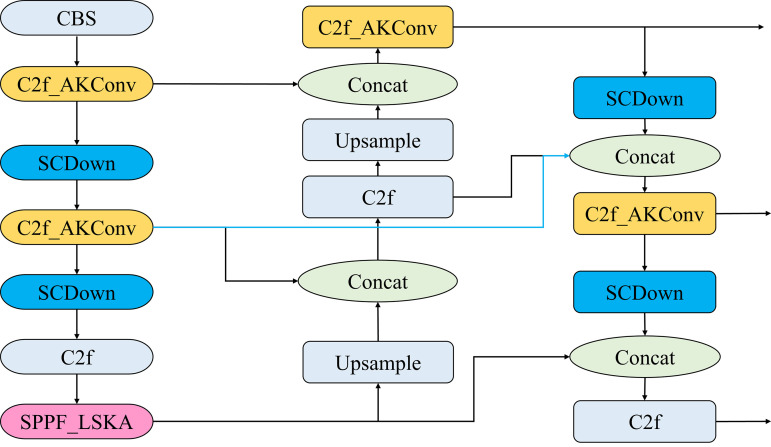
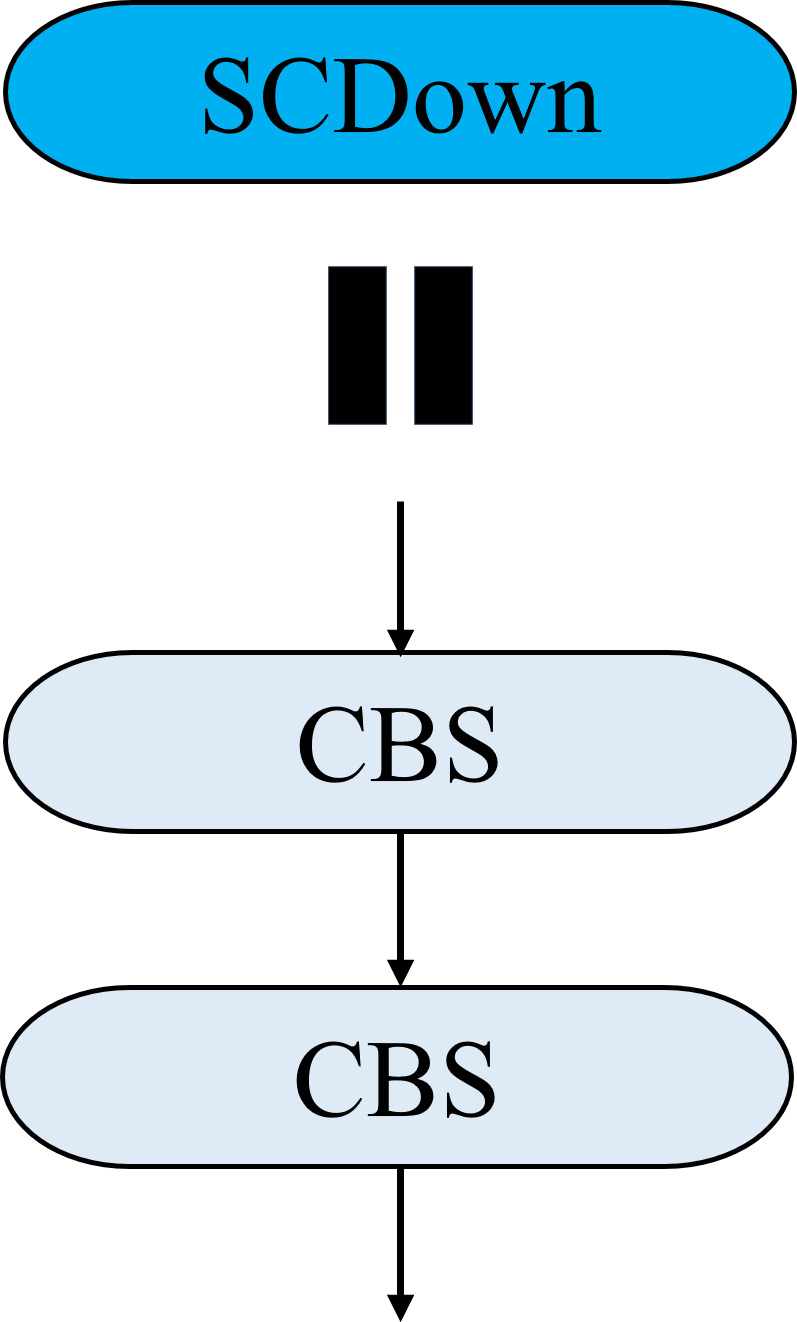
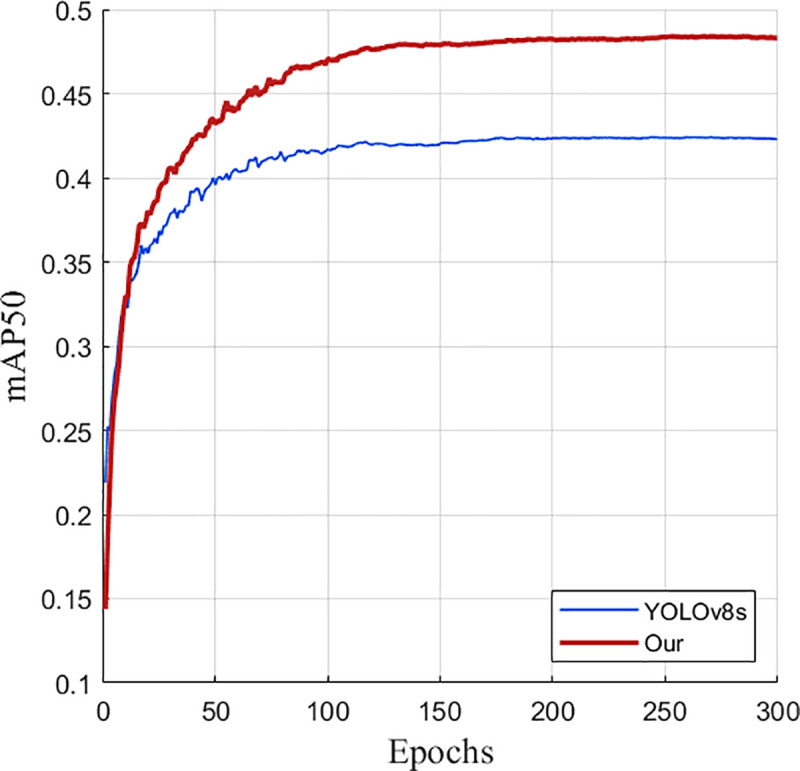
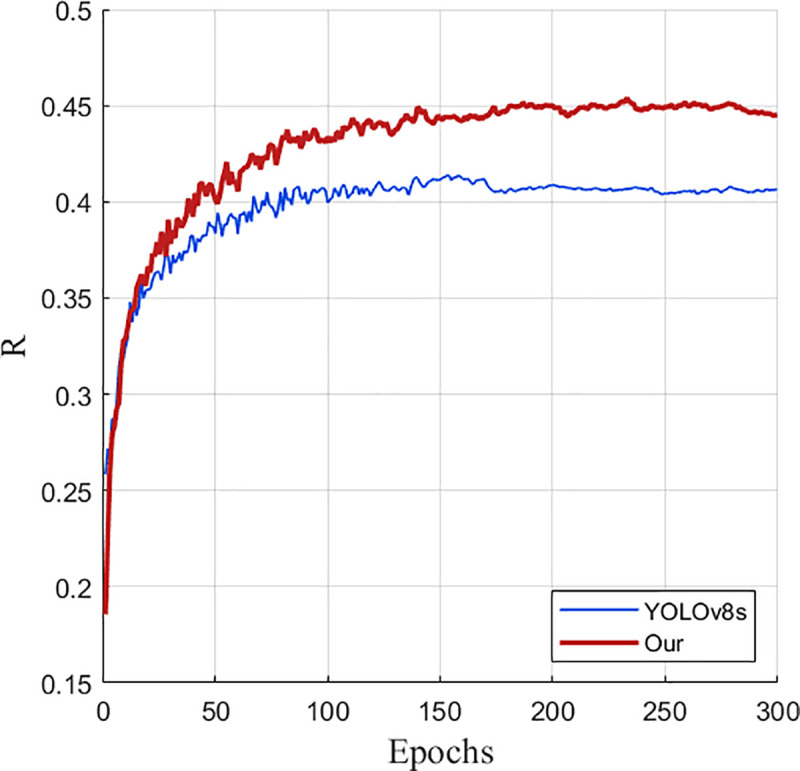
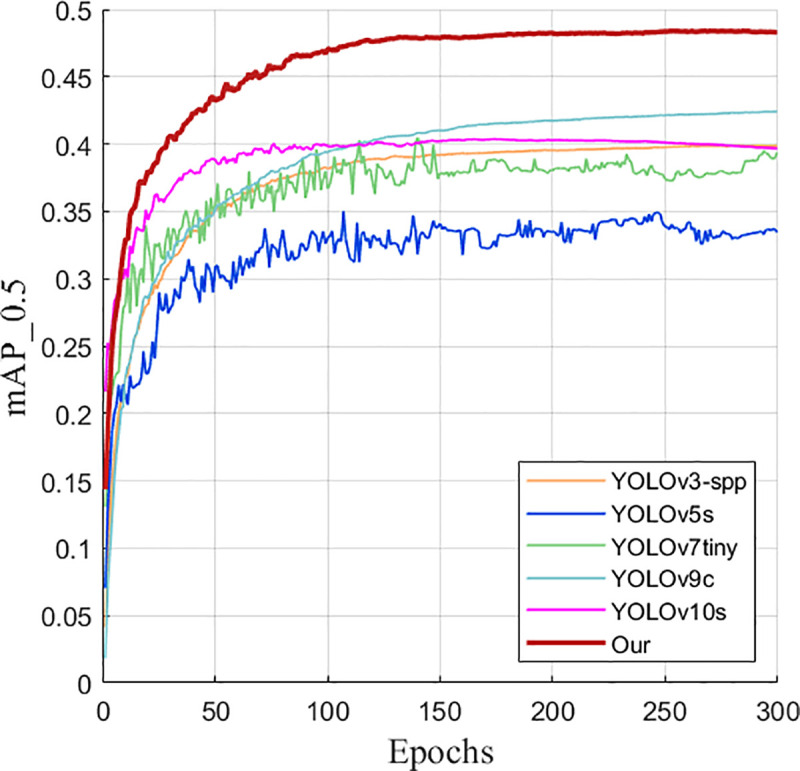
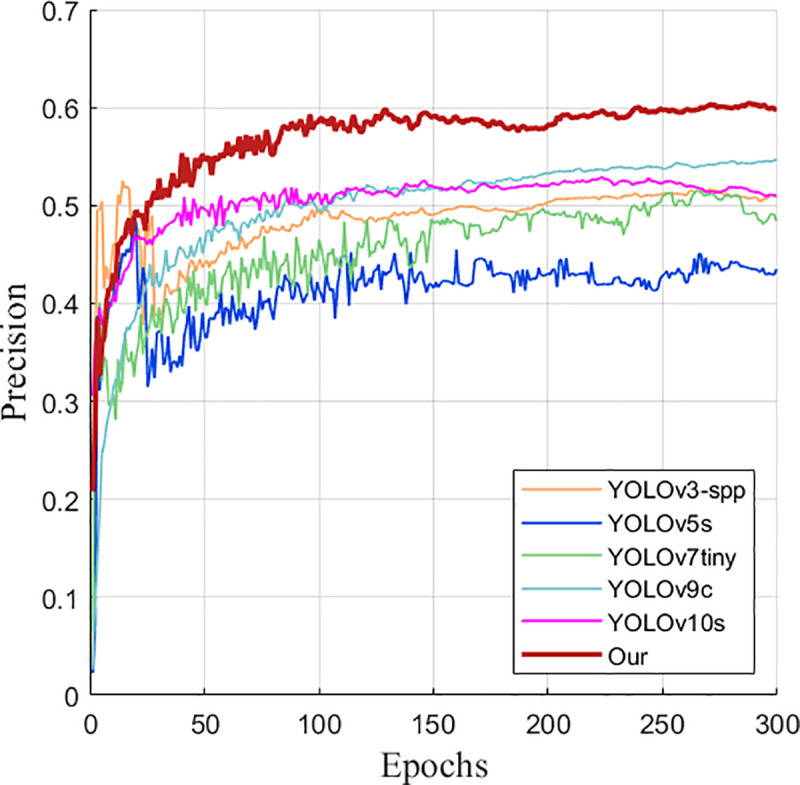
At present, the low-altitude economy is booming, and the application of drones has shown explosive growth, injecting new vitality into economic development. UAVs will face complex environmental perception and security risks when operating in low airspace. Accurate target detection technology has become a key support to ensure the orderly operation of UAVs. This paper studies UAV target detection algorithm based on deep learning, in order to improve detection accuracy and speed, and meet the needs of UAV autonomous perception under the background of low altitude economy. This study focuses on the limitations of the YOLOv8s target detection algorithm, including its low efficiency in multi-scale feature processing and insufficient small target detection capability, which hinder its ability to perform rapid and accurate large-scale searches for drones. An improved target detection algorithm is proposed to address these issues. The algorithm introduces AKConv into the C2F module. AKConv allows for convolution kernels with arbitrary numbers and sampling shapes, enabling convolution operations to more precisely adapt to targets at different locations, thereby achieving more efficient feature extraction. To further enhance the model's ability to extract critical features of small targets, the SPPF module incorporates the LSKA mechanism. This mechanism captures long-range dependencies and adaptivity more effectively while addressing computational complexity issues associated with large convolution kernels. Finally, the Bi-FPN feature pyramid network structure is introduced at the 18th layer of the model to accelerate and enrich feature fusion in the neck. Combined with the SCDown structure, a novel Bi-SCDown-FPN feature pyramid network structure is proposed, making it more suitable for detecting targets with insufficient feature capture in complex environments. Experimental results on the VisDrone2019 UAV dataset show that the improved algorithm achieves a 5.9%, 4.5%, and 6.1% increase in detection precision, detection recall, and mean average precision, respectively, compared to the original algorithm. Moreover, the parameter count and weight file size are reduced by 13.41% and 13.33%, respectively. Compared to other mainstream target detection algorithms, the proposed method demonstrates certain advantages. In summary, the target detection algorithm proposed in this paper achieves a dual improvement in model lightweighting and detection accuracy.
Copyright: © 2025 Wang et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures







Similar articles
-
Accurate recognition of UAVs on multi-scenario perception with YOLOv9-CAG.Sci Rep. 2025 Jul 30;15(1):27755. doi: 10.1038/s41598-025-12670-8. Sci Rep. 2025. PMID: 40739121 Free PMC article.
-
YOLO-GML: An object edge enhancement detection model for UAV aerial images in complex environments.PLoS One. 2025 Jul 10;20(7):e0328070. doi: 10.1371/journal.pone.0328070. eCollection 2025. PLoS One. 2025. PMID: 40638691 Free PMC article.
-
Integrated neural network framework for multi-object detection and recognition using UAV imagery.Front Neurorobot. 2025 Jul 30;19:1643011. doi: 10.3389/fnbot.2025.1643011. eCollection 2025. Front Neurorobot. 2025. PMID: 40809070 Free PMC article.
-
A systematic review on feature extraction methods and deep learning models for detection of cancerous lung nodules at an early stage -the recent trends and challenges.Biomed Phys Eng Express. 2024 Nov 20;11(1). doi: 10.1088/2057-1976/ad9154. Biomed Phys Eng Express. 2024. PMID: 39530659
-
The Black Book of Psychotropic Dosing and Monitoring.Psychopharmacol Bull. 2024 Jul 8;54(3):8-59. Psychopharmacol Bull. 2024. PMID: 38993656 Free PMC article. Review.
References
-
- Wang J, Jiang C, Han Z, Ren Y, Maunder RG, Hanzo L. Taking Drones to the Next Level: Cooperative Distributed Unmanned-Aerial-Vehicular Networks for Small and Mini Drones. IEEE Veh Technol Mag. 2017;12(3):73–82. doi: 10.1109/mvt.2016.2645481 - DOI
-
- Wang J, Jiang S, Song W, Yang Y. A Comparative Study of Small Object Detection Algorithms. In: 2019 Chinese Control Conference (CCC), 2019. 8507–12. doi: 10.23919/chicc.2019.8865157 - DOI
LinkOut - more resources
Full Text Sources
