

Light-driven lattice soft microrobot with multimodal locomotion
- PMID: 40877315
- PMCID: PMC12394689
- DOI: 10.1038/s41467-025-62676-z
Light-driven lattice soft microrobot with multimodal locomotion
Abstract
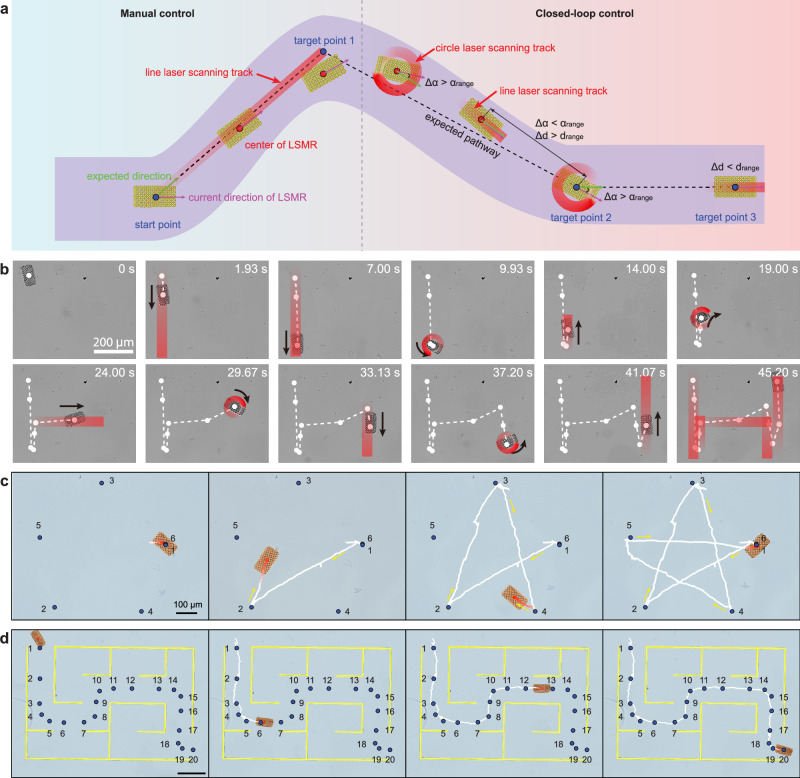
Untethered microrobots hold significant promise in fields such as bionics, biomedicine, and micromechanics. However, replicating the diverse movements of natural microorganisms in artificial microrobots presents a considerable challenge. This paper introduces a laser-based approach that utilizes lattice metamaterials to enhance the deformability of hydrogel-based microrobots, resulting in untethered light-driven lattice soft microrobots (LSMR). Constructed from poly(N-isopropylacrylamide)-single-walled carbon nanotubes (PNIPAM-SWNT) hydrogels and a truncated octahedron lattice structure, the LSMR benefits from reduced relative density, which increases flexibility and accelerates light-driven deformation. By employing sequential laser scanning, the LSMR achieves various locomotion modes, including linear peristalsis, in situ rotation, and hopping, through adjustments in scanning frequency, trajectory, and laser power. The LSMR achieves a continuous in situ rotation speed of 29.38°/s, nearly 30 times faster than previous studies, and exhibits a peristaltic locomotion speed of 15.15 μm/s (0.14 body lengths per second). The LSMR can autonomously perform programmed motions under closed-loop feedback control and navigate through narrow openings as small as 75% of its resting width by actively deforming. Compared to a solid microrobot, the lattice microrobot requires only one-sixth of the laser energy to achieve three times the motion speed, under otherwise identical conditions. These advancements mark a significant leap forward in the design and functionality of light-driven soft microrobots, offering promising avenues for future research in biomedicine, bionics, and micromechanical engineering.
© 2025. The Author(s).
Conflict of interest statement
Competing interests: The authors declare no competing interests.
Figures





Similar articles
-
Prescription of Controlled Substances: Benefits and Risks.2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. 2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. PMID: 30726003 Free Books & Documents.
-
Self-Assembly and Collective Locomotion Behavior of Swarm Microrobot.Small. 2025 Aug;21(33):e2504289. doi: 10.1002/smll.202504289. Epub 2025 Jun 23. Small. 2025. PMID: 40545868
-
Fabrication of hydrogel mini-capsules as carrier systems.Open Res Eur. 2025 Jul 25;3:191. doi: 10.12688/openreseurope.16723.3. eCollection 2023. Open Res Eur. 2025. PMID: 39619157 Free PMC article.
-
Management of urinary stones by experts in stone disease (ESD 2025).Arch Ital Urol Androl. 2025 Jun 30;97(2):14085. doi: 10.4081/aiua.2025.14085. Epub 2025 Jun 30. Arch Ital Urol Androl. 2025. PMID: 40583613 Review.
-
AI-Driven Antimicrobial Peptide Discovery: Mining and Generation.Acc Chem Res. 2025 Jun 17;58(12):1831-1846. doi: 10.1021/acs.accounts.0c00594. Epub 2025 Jun 3. Acc Chem Res. 2025. PMID: 40459283 Free PMC article. Review.
References
-
- Zhu, B., Salehi, A., Xu, L., Yuan, W. & Yu, T. Multi-module micro/nanorobots for biomedical and environmental remediation applications. Adv. Intell. Syst. 7, 2400779 (2025).
-
- Kim, M., Nicholas, J. D., Puigmartí-Luis, J., Nelson, B. J. & Pané, S. Targeted drug delivery: from chemistry to robotics at small scales. Annu. Rev. Control Rob. Auton. Syst. 8, 379–405 (2025).
-
- Wang, L. et al. 4D direct laser writing for intelligent micromachines. Adv. Funct. Mater.35, 2414571 (2025).
-
- Yasa, O. et al. An overview of soft robotics. Annu. Rev. Control Rob. Auton. Syst.6, 1–29 (2023).
-
- Hu, C., Pané, S. & Nelson, B. J. Soft micro- and nanorobotics. Annu. Rev. Control Rob. Auton. Syst.1, 53–75 (2018).
Grants and funding
LinkOut - more resources
Full Text Sources
