

Biomimetic microstructure design for ultrasensitive piezoionic mechanoreceptors in multimodal object recognition
- PMID: 40885715
- PMCID: PMC12398529
- DOI: 10.1038/s41467-025-63115-9
Biomimetic microstructure design for ultrasensitive piezoionic mechanoreceptors in multimodal object recognition
Abstract
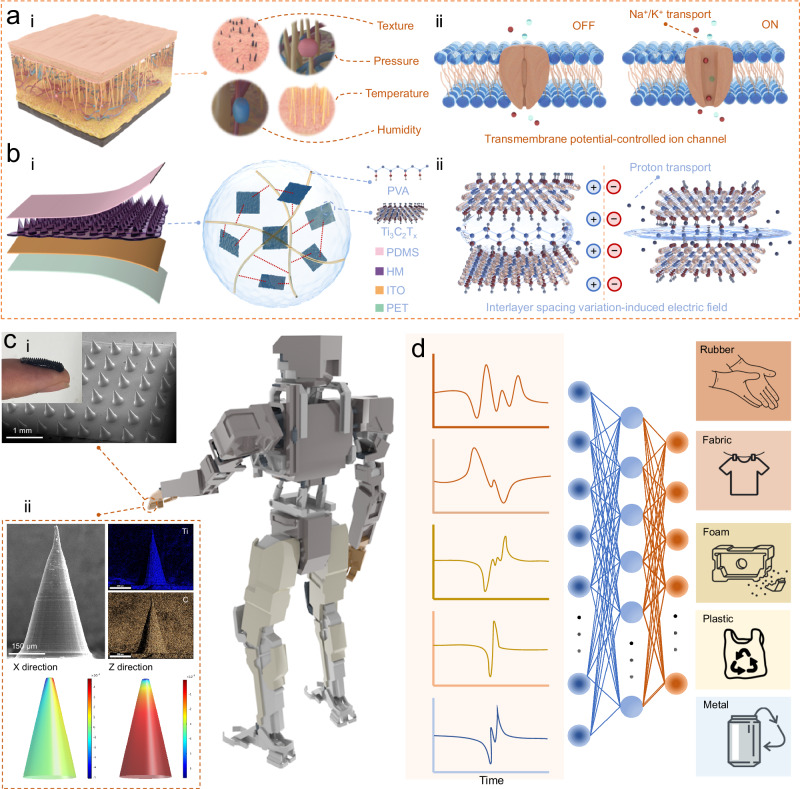
The challenge of achieving high recognition accuracy in artificial mechanoreceptors arises from the trade-off between sensitivity and stability in the sensing unit. Inspired by human skin, we developed a biomimetic approach that involves structural and engineering enhancements for ionic-conducting polyvinyl alcohol/Ti3C2Tx (PVA/MXene) composite hydrogel microneedles (HM) to enhance the sensitivity. By integrating the HM with a polyethylene terephthalate/indium tin oxide (PET/ITO) film, we create a non-faradaic junction that ensures stable electrical output without transmission loss under stimulation. Furthermore, the significant alteration in nanosheet spacing facilitates proton transport along the MXene microchannels, increasing the plasmonic gradient between the junction and the hydrogel's center, thereby boosting piezoionic efficiency. Consequently, the biomimetic sensing unit achieves a high power density of 165.6 mW m-2 and exceptional sensing stability over 10,000 cycles. When combined with vertical memristor units, this system effectively captures and transforms characteristic signals from various objects, achieving a recognition accuracy of 90%.
© 2025. The Author(s).
Conflict of interest statement
Competing interests: The authors declare no competing interests.
Figures




Similar articles
-
Prescription of Controlled Substances: Benefits and Risks.2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. 2025 Jul 6. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. PMID: 30726003 Free Books & Documents.
-
Polyaniline/Ti3C2 MXene Composites with Artificial 3D Biomimetic Surface Structure of Natural Macaw Feather Applied for Anticorrosion Coatings.Biomimetics (Basel). 2025 Jul 15;10(7):465. doi: 10.3390/biomimetics10070465. Biomimetics (Basel). 2025. PMID: 40710278 Free PMC article.
-
PET-CT for assessing mediastinal lymph node involvement in patients with suspected resectable non-small cell lung cancer.Cochrane Database Syst Rev. 2014 Nov 13;2014(11):CD009519. doi: 10.1002/14651858.CD009519.pub2. Cochrane Database Syst Rev. 2014. PMID: 25393718 Free PMC article.
-
Short-Term Memory Impairment.2024 Jun 8. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. 2024 Jun 8. In: StatPearls [Internet]. Treasure Island (FL): StatPearls Publishing; 2025 Jan–. PMID: 31424720 Free Books & Documents.
-
Artificial intelligence for diagnosing exudative age-related macular degeneration.Cochrane Database Syst Rev. 2024 Oct 17;10(10):CD015522. doi: 10.1002/14651858.CD015522.pub2. Cochrane Database Syst Rev. 2024. PMID: 39417312
References
-
- Kang, K., Kim, K., Baek, J., Lee, D. J. & Yu, K. J. Biomimic and bioinspired soft neuromorphic tactile sensory system. Appl. Phys. Rev.11, 021328 (2024).
-
- Yang, T.-H. et al. Recent advances and opportunities of active materials for haptic technologies in virtual and augmented reality. Adv. Funct. Mater.31, 202008831 (2021).
-
- Dai, Y., Hu, H., Wang, M., Xu, J. & Wang, S. Stretchable transistors and functional circuits for human-integrated electronics. Nat. Electron.4, 17–29 (2021).
-
- Zhao, C., Park, J., Root, S. E. & Bao, Z. Skin-inspired soft bioelectronic materials, devices and systems. Nat. Rev. Bioeng.2, 671–690 (2024).
LinkOut - more resources
Full Text Sources
Miscellaneous
