

Evaluation of Fiber Optic Shape Sensing Models for Minimally Invasive Prostate Needle Procedures Using OFDR Data
- PMID: 41200501
- PMCID: PMC12588074
- DOI: 10.1109/jsen.2025.3620154
Evaluation of Fiber Optic Shape Sensing Models for Minimally Invasive Prostate Needle Procedures Using OFDR Data
Abstract
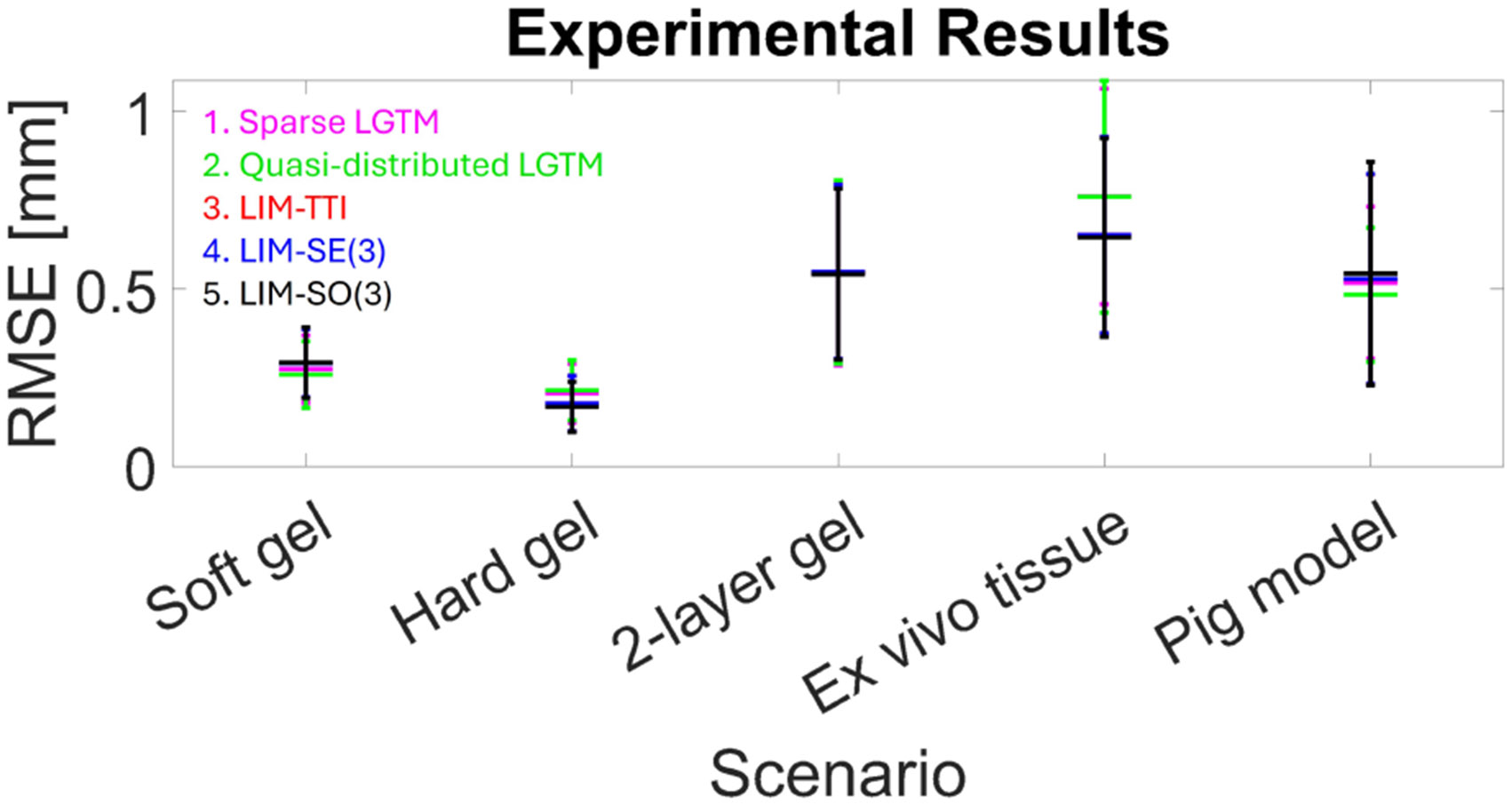
This paper presents a systematic evaluation of fiber optic shape sensing models for prostate needle interventions using a single needle embedded with a three-fiber optical frequency domain reflectometry (OFDR) sensor. Two reconstruction algorithms were evaluated: (1) Linear Interpolation Models (LIM), a geometric method that directly estimates local curvature and orientation from distributed strain measurements, and (2) the Lie-Group Theoretic Model (LGTM), a physics-informed elastic-rod model that globally fits curvature profiles while accounting for tissue-needle interaction. Using software-defined strain-point selection, both sparse and quasi-distributed sensing configurations were emulated from the same OFDR data. Experiments were conducted in homogeneous and two-layer gel phantoms, ex vivo tissue, and a whole-body cadaveric pig model. While the repeated-measures ANOVA did not detect any significant differences, the Friedman test analysis revealed statistically significant differences in RMSEs between LIM and LGTM (p < 0.05), with LIM outperforming LGTM in the ex vivo tissue scenario. LIM also achieved over 50-fold faster computation (< 1 ms vs. > 40 ms per shape), enabling real-time use. These findings highlight the trade-offs between model complexity, sensing density, computational load, and tissue variability, providing guidance for selecting shape-sensing strategies in clinical and robotic needle interventions.
Keywords: Fiber optic shape sensing; Lie group methods; linear interpolation; minimally invasive surgery; needle guidance systems; optical frequency domain reflectometry (OFDR); prostate needle interventions; shape reconstruction algorithms.
Figures




References
-
- Bray F, Laversanne M, Sung H, Ferlay J, Siegel RL, Soerjomataram I, and Jemal A, “Global cancer statistics 2022: Globocan estimates of incidence and mortality worldwide for 36 cancers in 185 countries,” CA: A Cancer Journal for Clinicians, vol. 74, no. 3, pp. 229–263, 2024. [Online]. Available: https://acsjournals.onlinelibrary.wiley.com/doi/abs/10.3322/caac.21834 - DOI - PubMed
-
- Fichtinger G, Fiene J, Kennedy CW, Kronreif G, Iordachita II, Song DY, Clif Burdette E, and Kazanzides P, “Robotic assistance for ultrasound guided prostate brachytherapy,” in Medical Image Computing and Computer-Assisted Intervention – MICCAI 2007, Ayache N, Ourselin S, and Maeder A, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2007, pp. 119–127.
-
- Blumenfeld P, Hata N, DiMaio S, Zou K, Haker S, Fichtinger G, and Tempany CM, “Transperineal prostate biopsy under magnetic resonance image guidance: A needle placement accuracy study,” Journal of Magnetic Resonance Imaging, vol. 26, no. 3, pp. 688–694, 2007. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10.1002/jmri.21067 - DOI - PubMed
-
- Jahya A, van der Heijden F, and Misra S, “Observations of three-dimensional needle deflection during insertion into soft tissue,” in 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2012, pp. 1205–1210.
Grants and funding
LinkOut - more resources
Full Text Sources