

Tagged MR imaging in a deforming phantom: photographic validation
- PMID: 8115625
- PMCID: PMC2396255
- DOI: 10.1148/radiology.190.3.8115625
Tagged MR imaging in a deforming phantom: photographic validation
Abstract
Purpose: To validate cine magnetic resonance (MR) image tagging measurements of a deforming object by means of a precise photographic method.
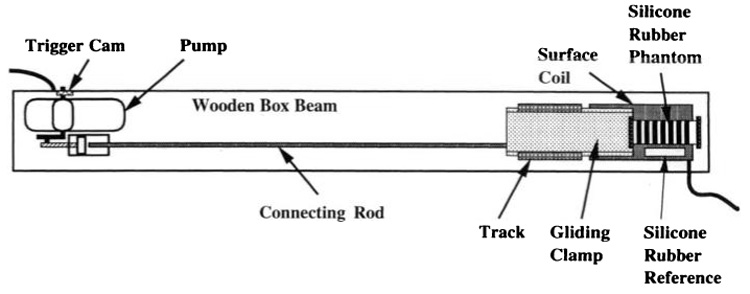
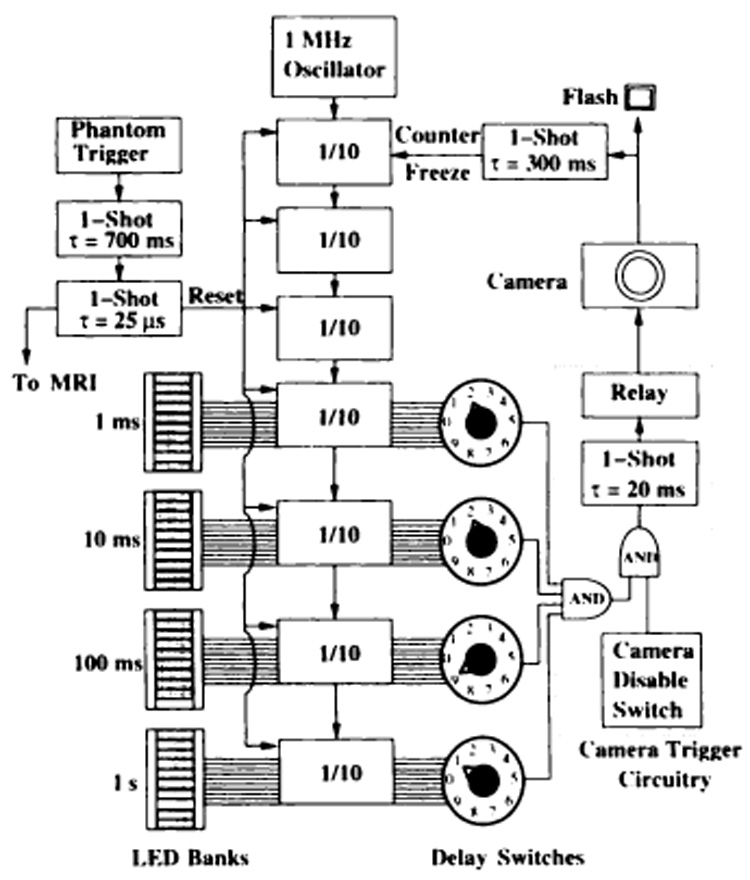
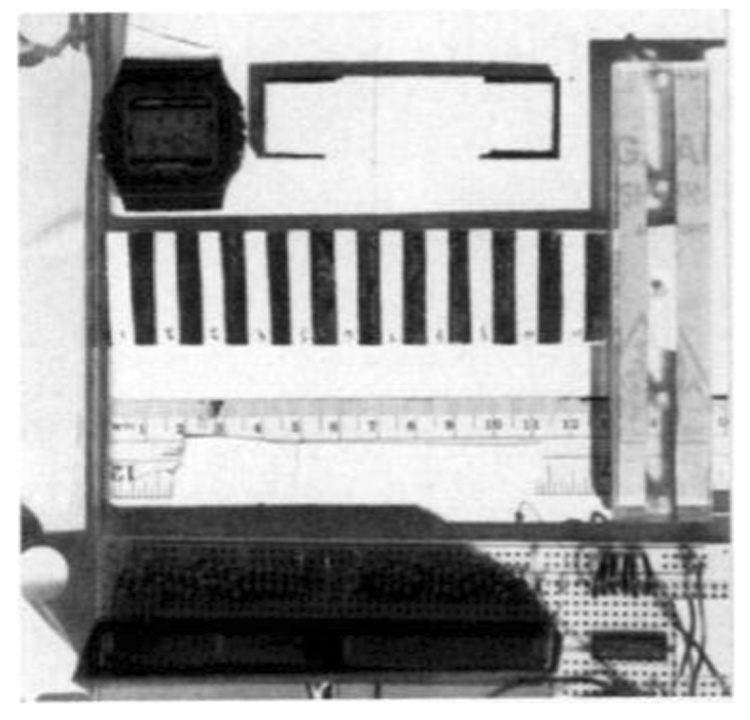
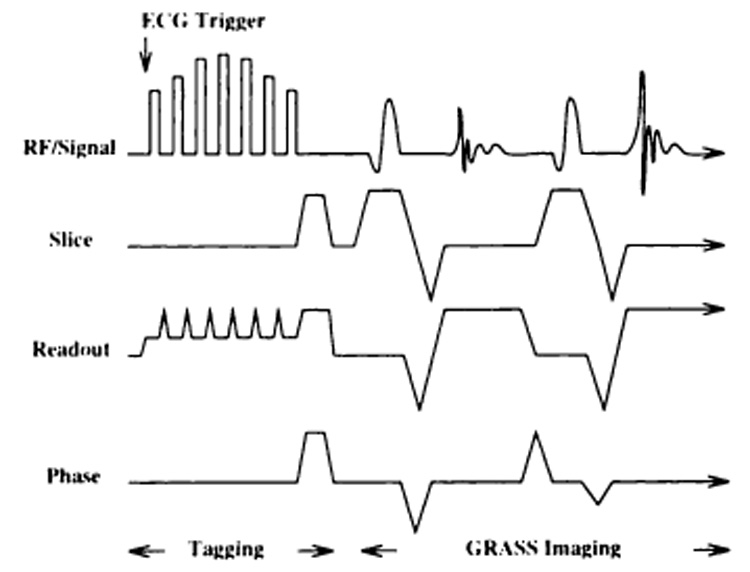
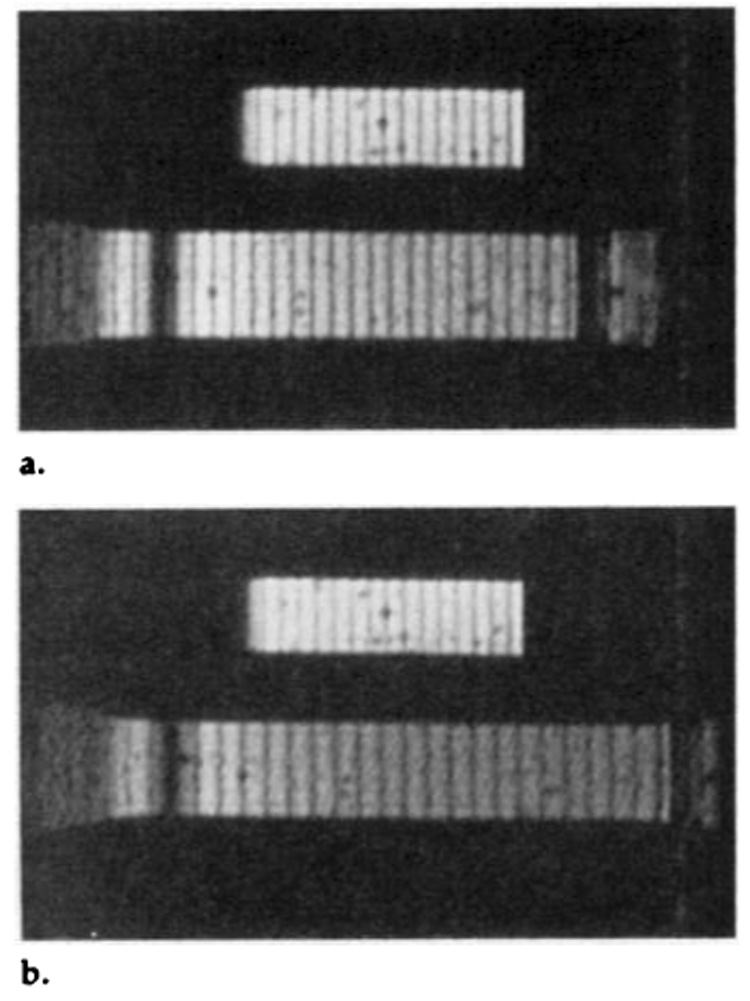
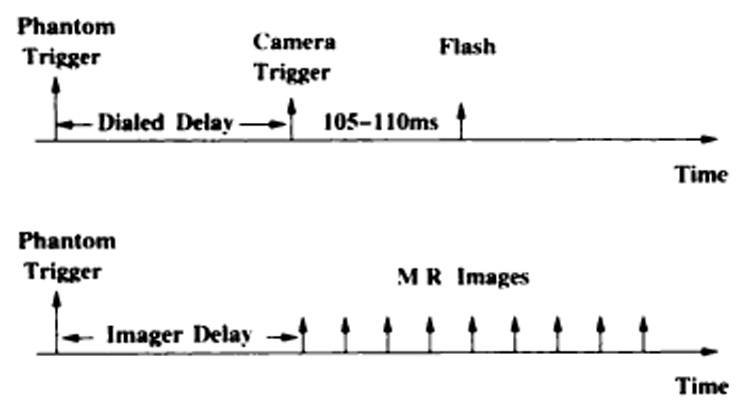
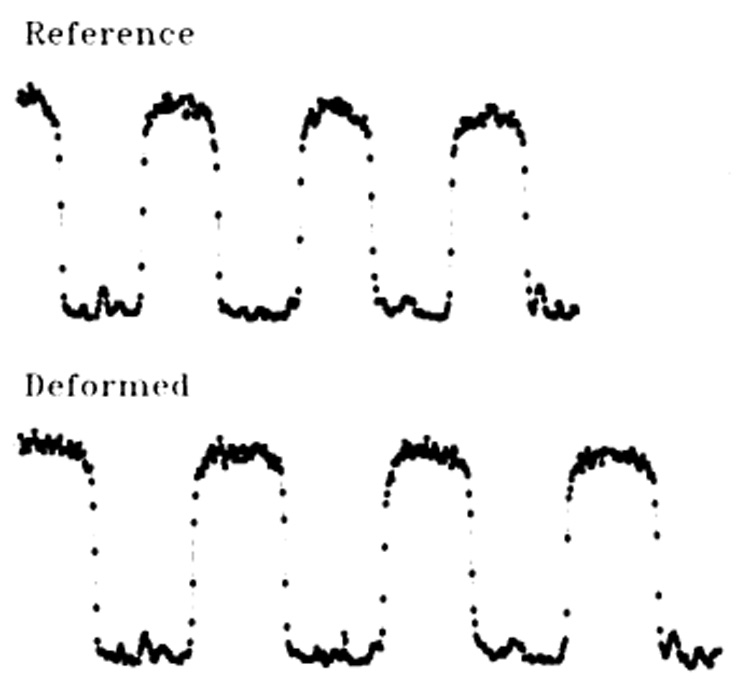
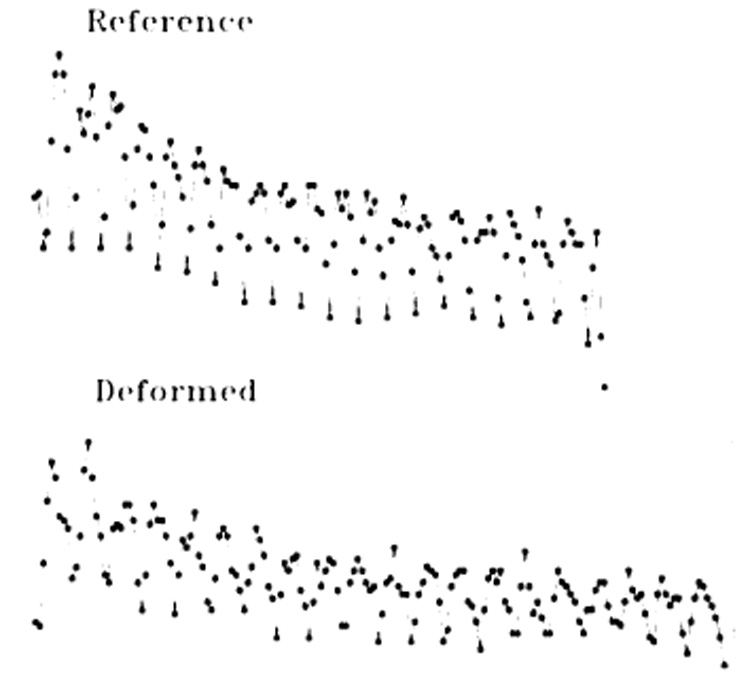
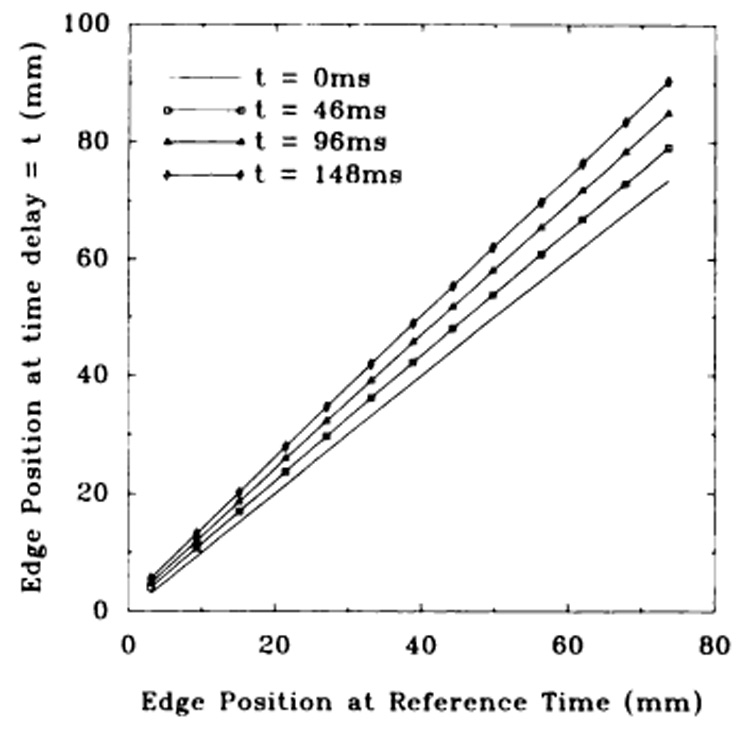
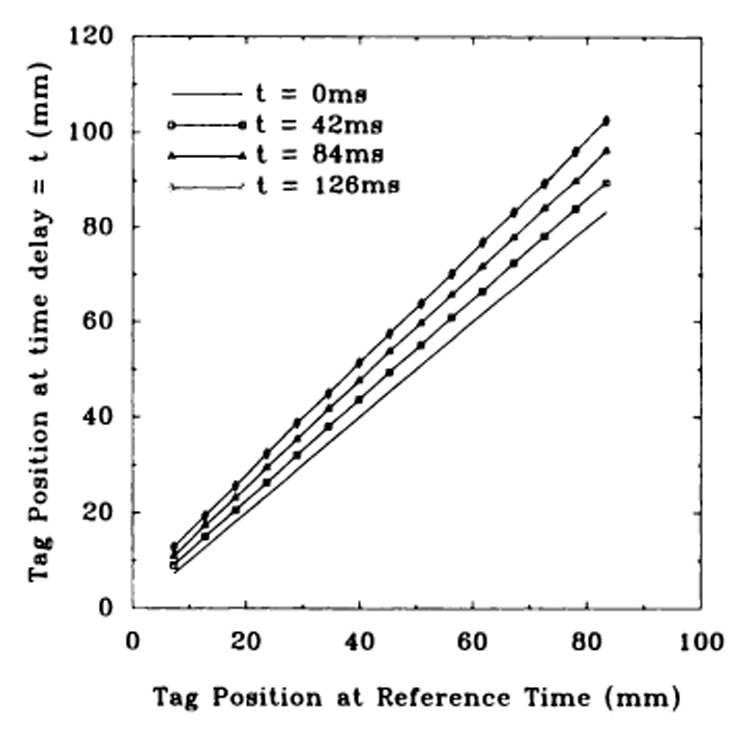
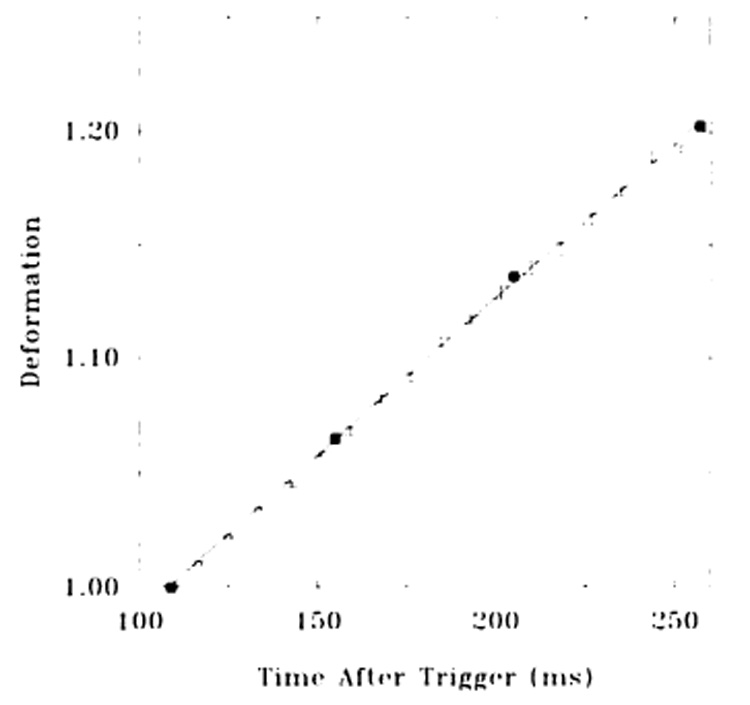
Materials and methods: A piece of silicone rubber that acted as a phantom was stretched in a cyclical fashion inside a plastic clamp driven by a respirator pump. Deformation as a function of time was measured with a rapid gradient-echo cine tagging sequence and with sequential stroboscopic photographs. Deformations from 1.0 to 1.2 (0% to 20% stretch) in the readout direction were measured over a 7-cm region of the phantom, which had a maximum standard error of +/- 0.001 with photography and a maximum standard error of +/- 0.003 with MR imaging.
Results: The deformation versus time values measured with MR imaging had a standard error of 0.002 about a straight line fit to the photographic deformation versus time data. These results demonstrate that the MR imaging deformation estimates were accurate and precise.
Conclusion: The validated tagging method can now be used to evaluate MR imaging motion estimation techniques.
Figures
References
-
- Zerhouni EA, Parish DM, Rogers WJ, Yang A, Shapiro EP. Human heart: tagging with MR imaging—a method for noninvasive assessment of myocardial motion. Radiology. 1988;169:59–63. - PubMed
-
- Mosher TJ, Smith MB. A DANTE tagging sequence for the evaluation of translational sample motion. Magn Reson Med. 1990;15:334–339. - PubMed
-
- Axel L, Dougherty L. MR imaging of motion with spatial modulation of magnetization. Radiology. 1989;171:841–849. - PubMed
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
