

Predicting the consequences of our own actions: the role of sensorimotor context estimation
- PMID: 9736669
- PMCID: PMC6793221
- DOI: 10.1523/JNEUROSCI.18-18-07511.1998
Predicting the consequences of our own actions: the role of sensorimotor context estimation
Abstract
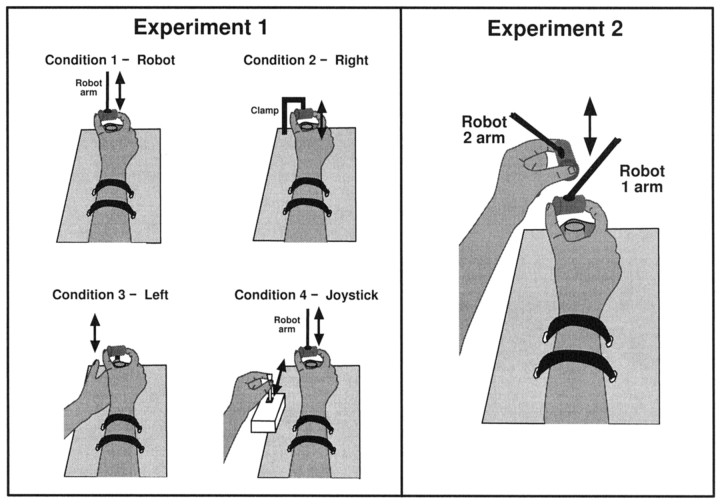
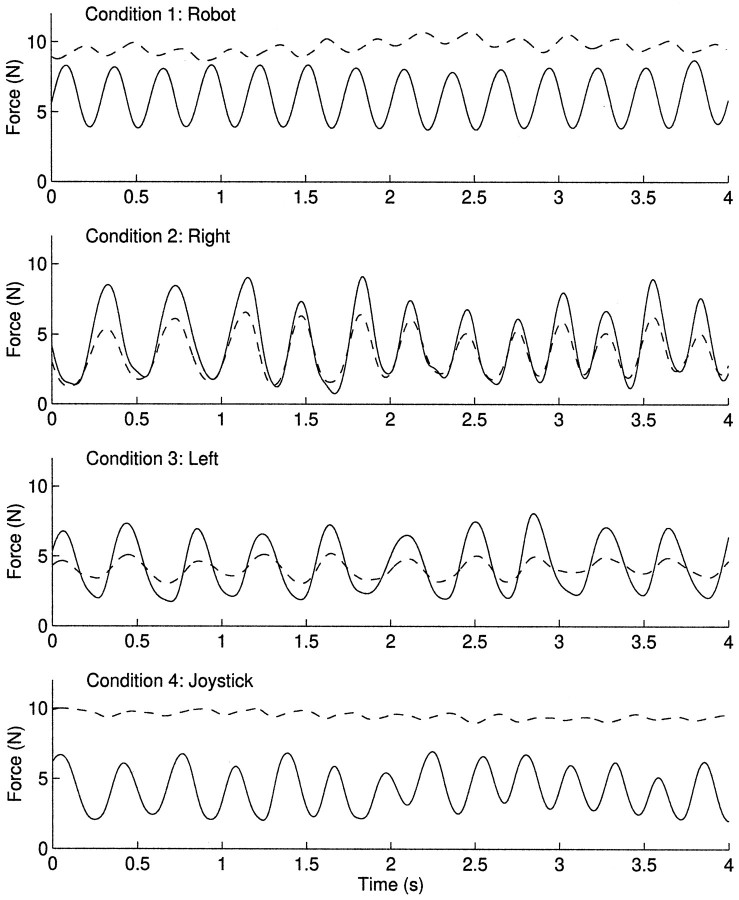
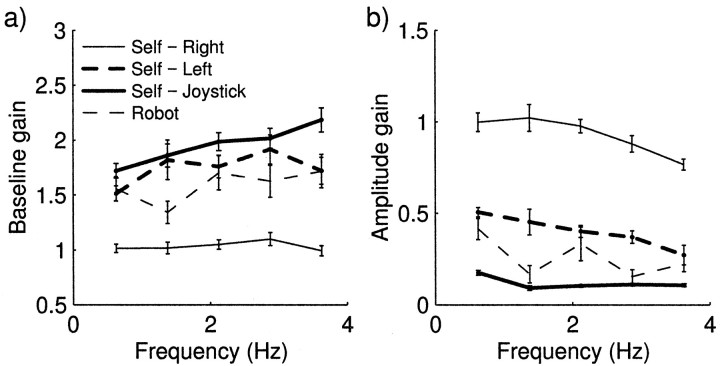
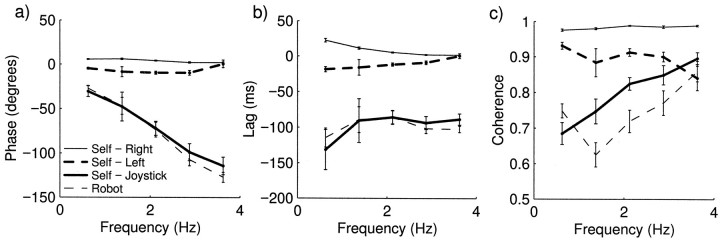
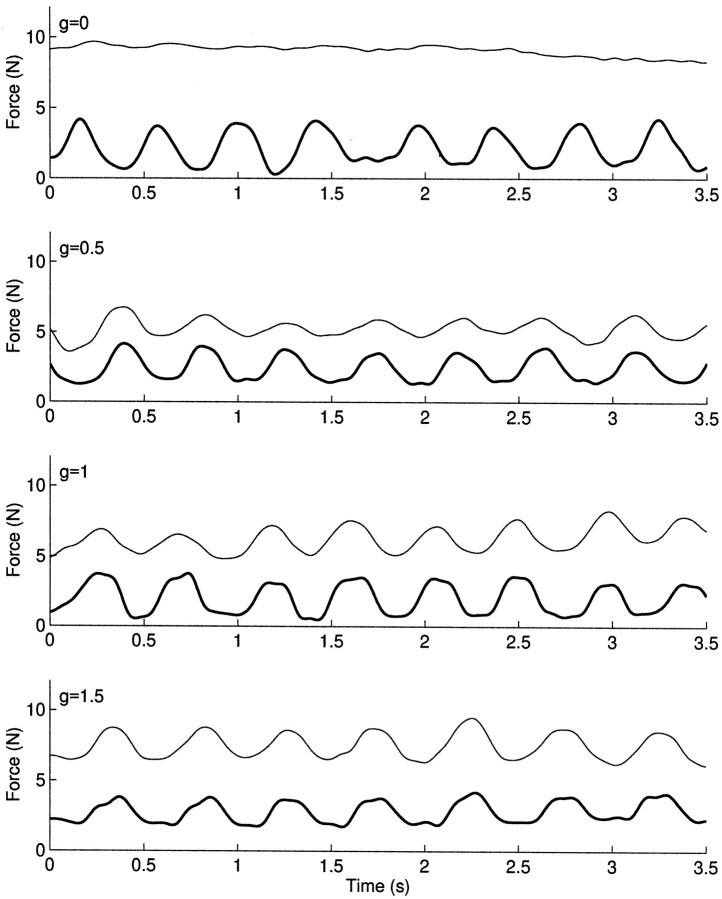
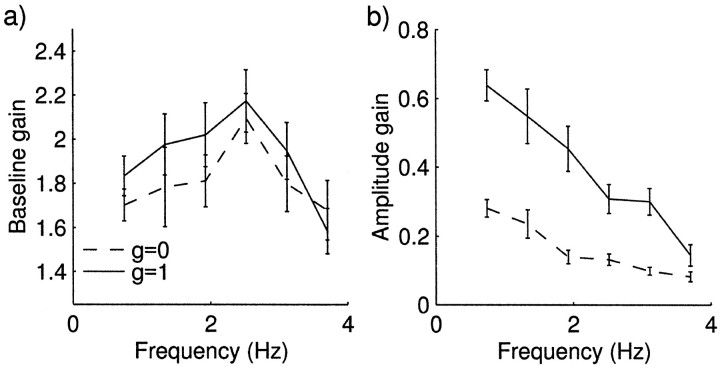
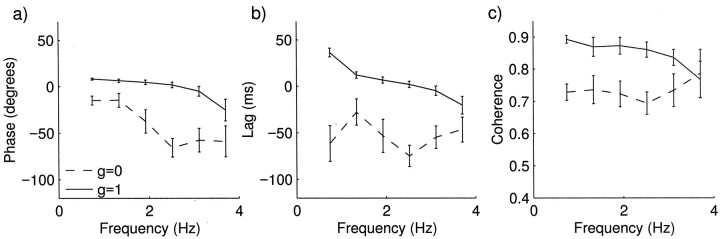
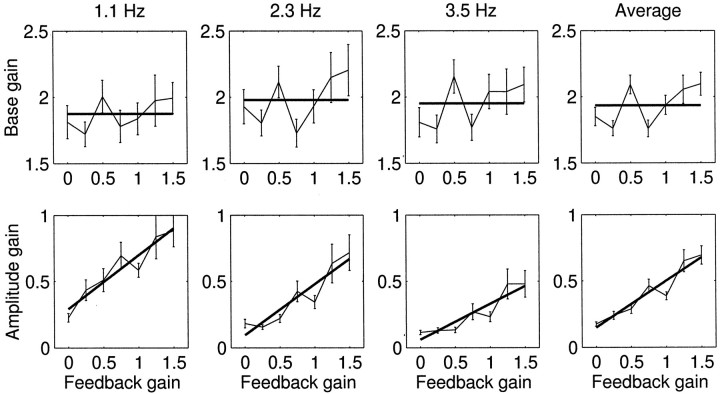
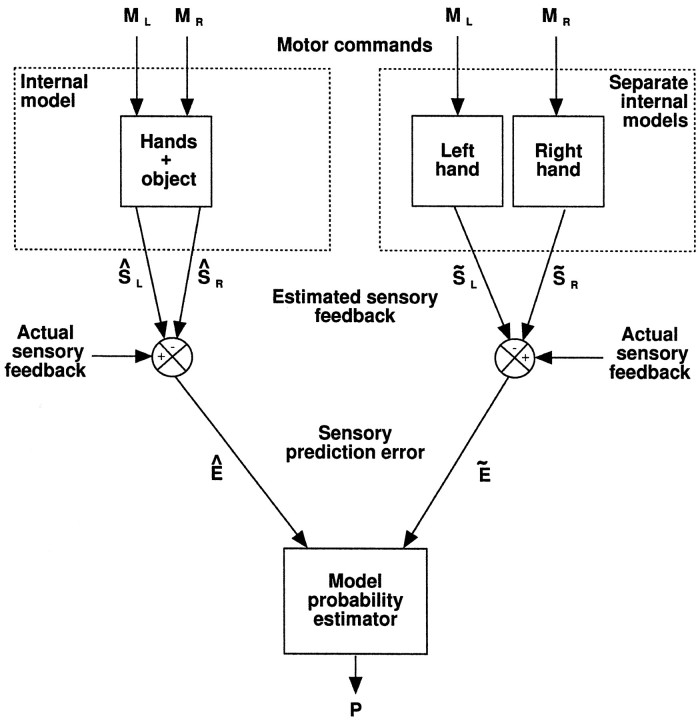
During self-generated movement it is postulated that an efference copy of the descending motor command, in conjunction with an internal model of both the motor system and environment, enables us to predict the consequences of our own actions (von Helmholtz, 1867; Sperry, 1950; von Holst, 1954; Wolpert, 1997). Such a prediction is evident in the precise anticipatory modulation of grip force seen when one hand pushes on an object gripped in the other hand (Johansson and Westling, 1984; Flanagan and Wing, 1933). Here we show that self-generation is not in itself sufficient for such a prediction. We used two robots to simulate virtual objects held in one hand and acted on by the other. Precise predictive grip force modulation of the restraining hand was highly dependent on the sensory feedback to the hand producing the load. The results show that predictive modulation requires not only that the movement is self-generated, but also that the efference copy and sensory feedback are consistent with a specific context; in this case, the manipulation of a single object. We propose a novel computational mechanism whereby the CNS uses multiple internal models, each corresponding to a different sensorimotor context, to estimate the probability that the motor system is acting within each context.
Figures
References
-
- Burstedt MKO, Birznieks I, Edin BB, Johansson RS. Control of forces applied by individual fingers engaged in restraint of an active object. J Neurophysiol. 1997;78:117–128. - PubMed
-
- Cole KJ, Abbs JH. Grip force adjustments evoked by load force perturbations of a grasped object. J Neurophysiol. 1988;60:1513–1522. - PubMed
-
- Dufosse M, Hugon M, Massion J. Postural forearm changes induced by predictable in time or voluntary triggered unloading in man. Exp Brain Res. 1985;60:330–334. - PubMed
-
- Eliasson AC, Forssberg H, Ikuta K, Apel I, Westling G, Johansson R. Development of human precision grip. V. Anticipatory and triggered grip actions during sudden loading. Exp Brain Res. 1995;106:425–433. - PubMed
-
- Flanagan JR, Wing AM. Modulation of grip force with load force during point-to-point arm movements. Exp Brain Res. 1993;95:131–143. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical