

Task-dependent viscoelasticity of human multijoint arm and its spatial characteristics for interaction with environments
- PMID: 9787002
- PMCID: PMC6793558
- DOI: 10.1523/JNEUROSCI.18-21-08965.1998
Task-dependent viscoelasticity of human multijoint arm and its spatial characteristics for interaction with environments
Abstract
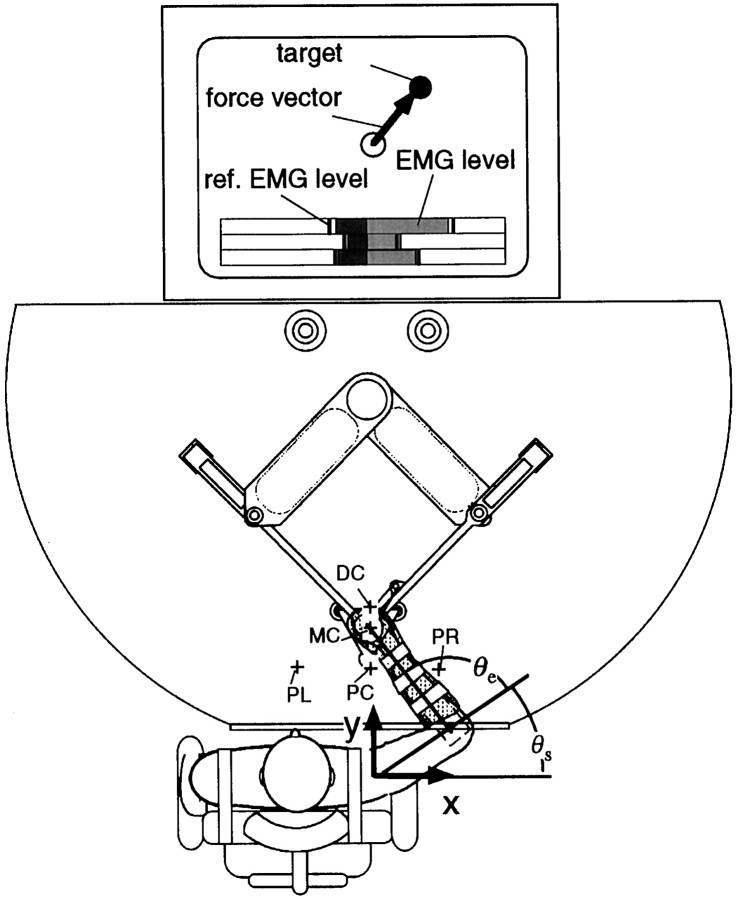
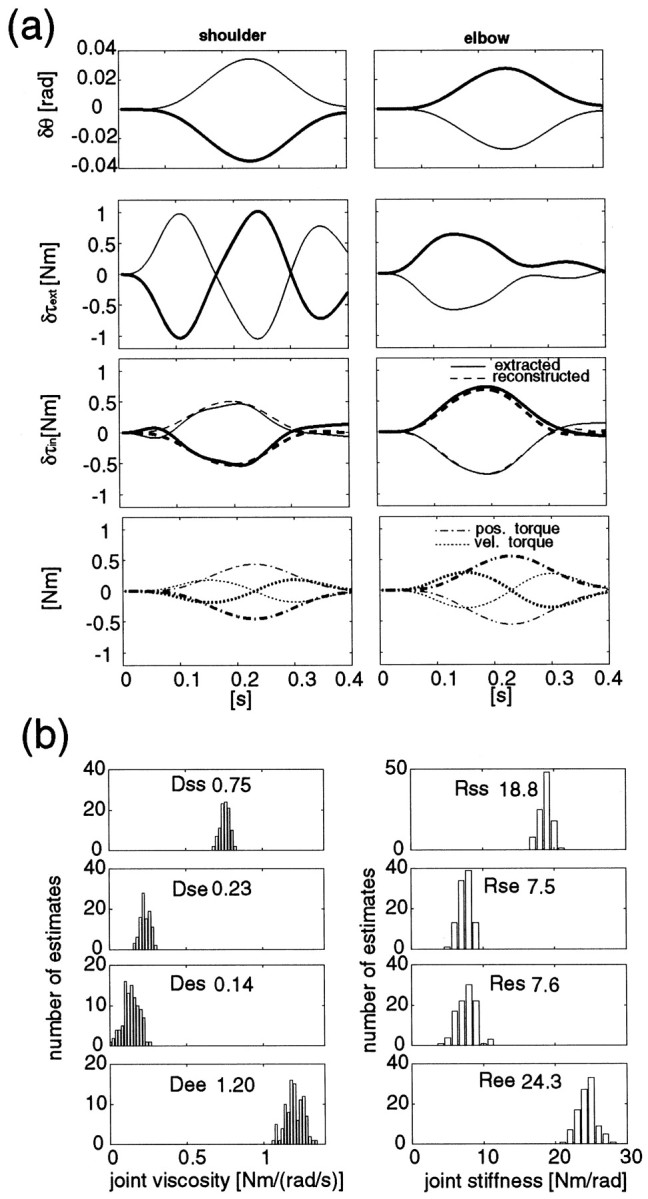
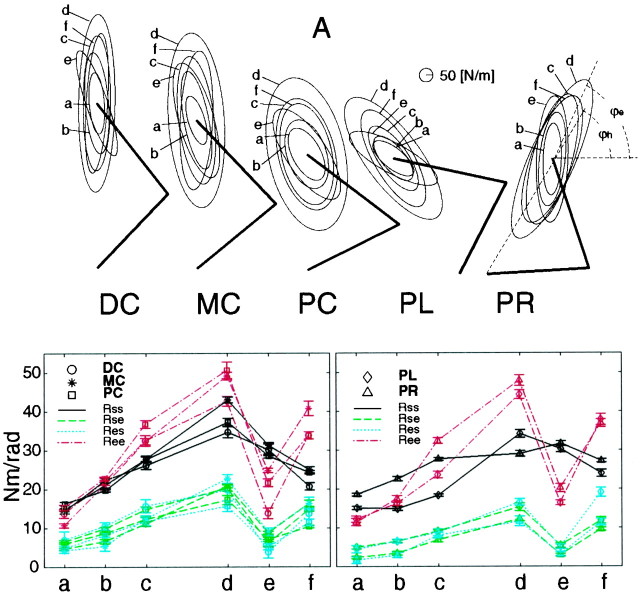
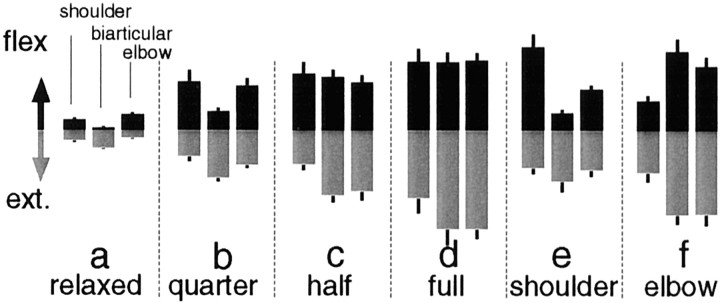
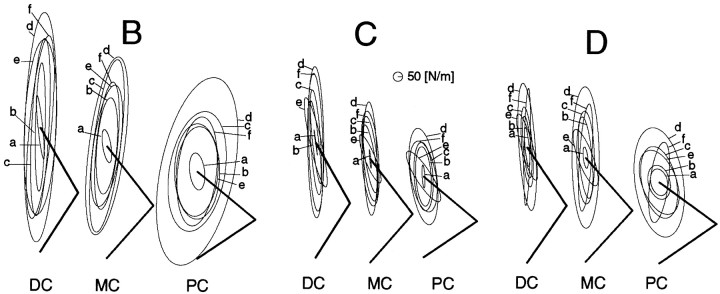
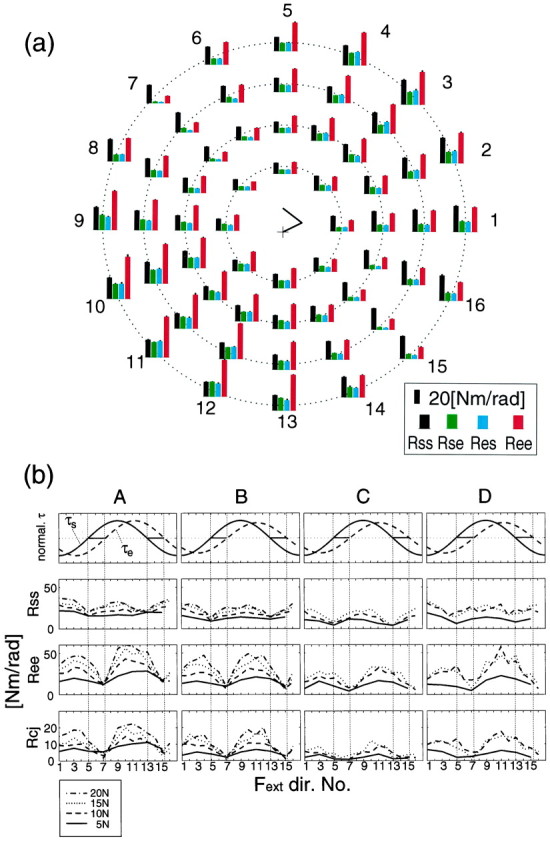
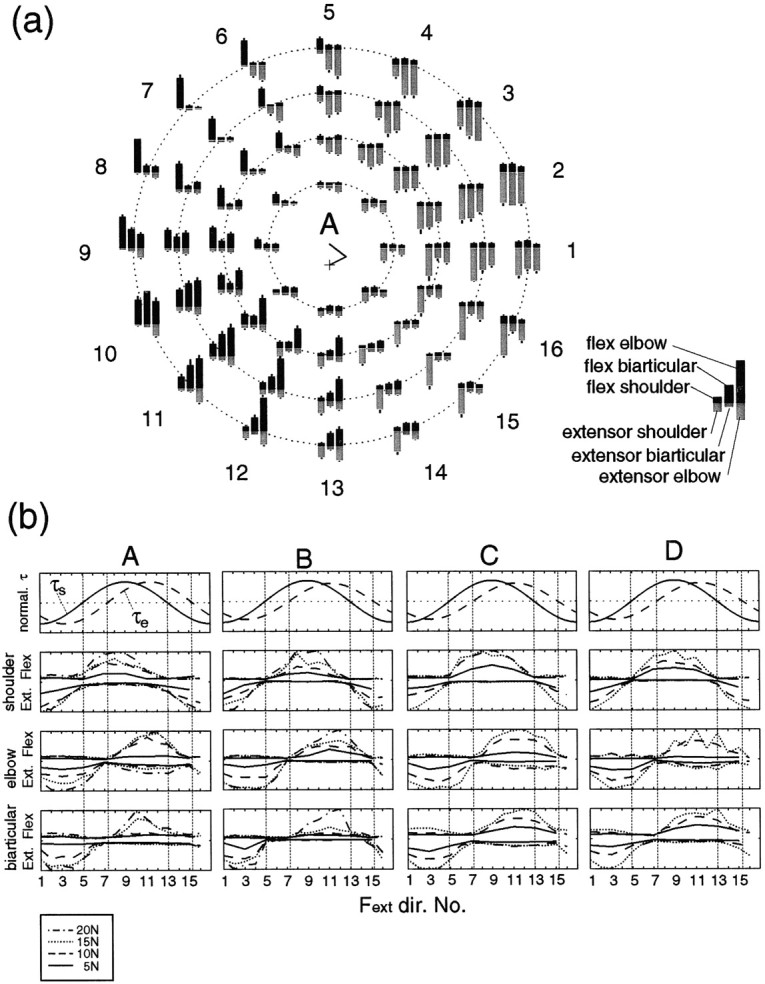
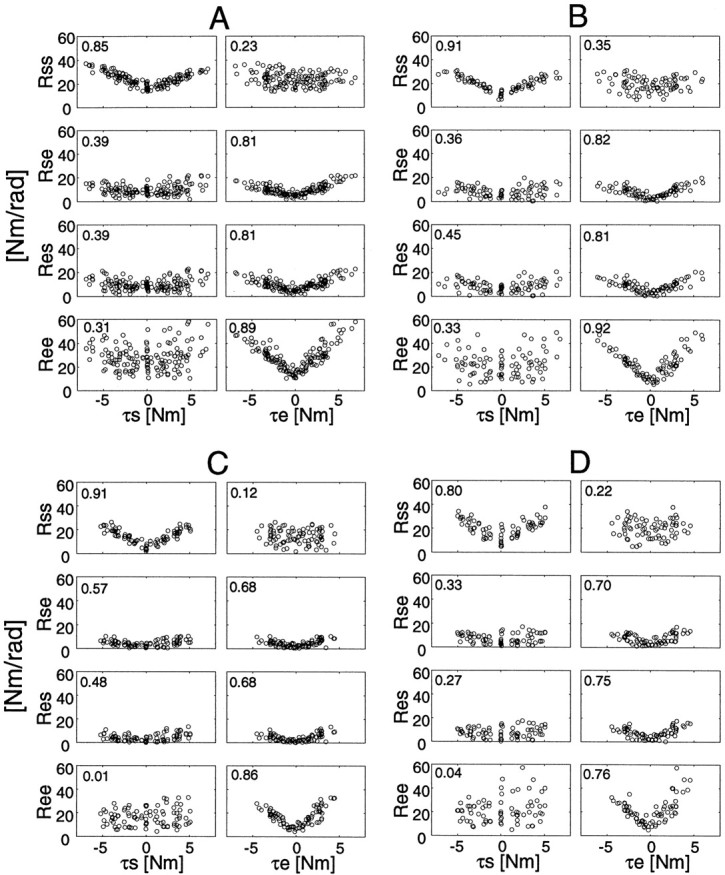
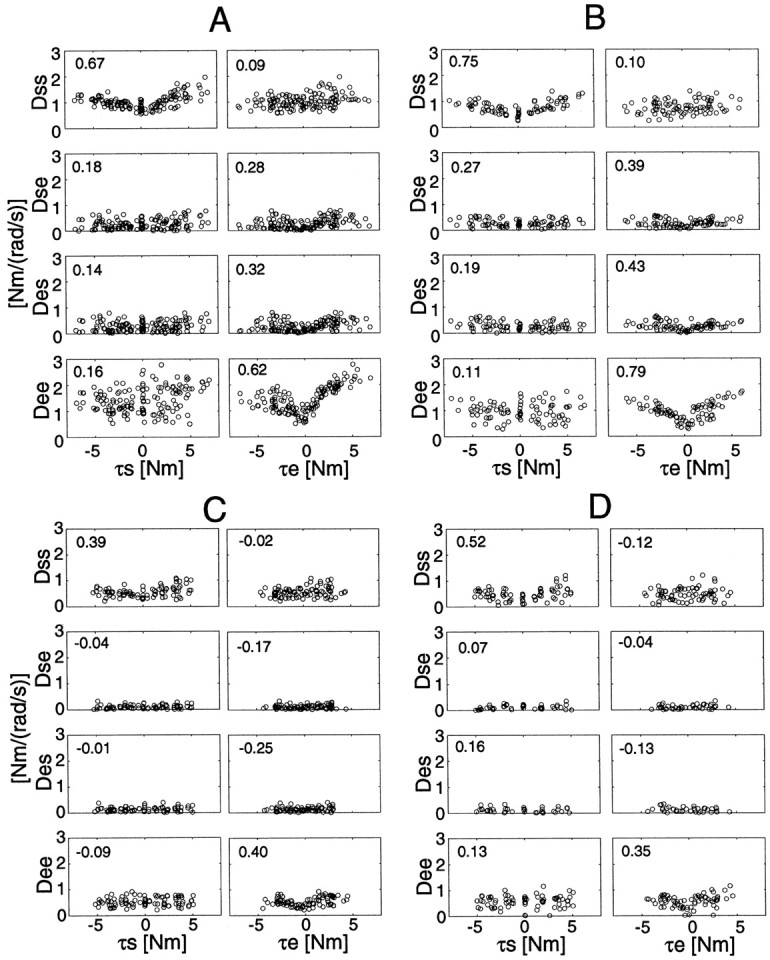
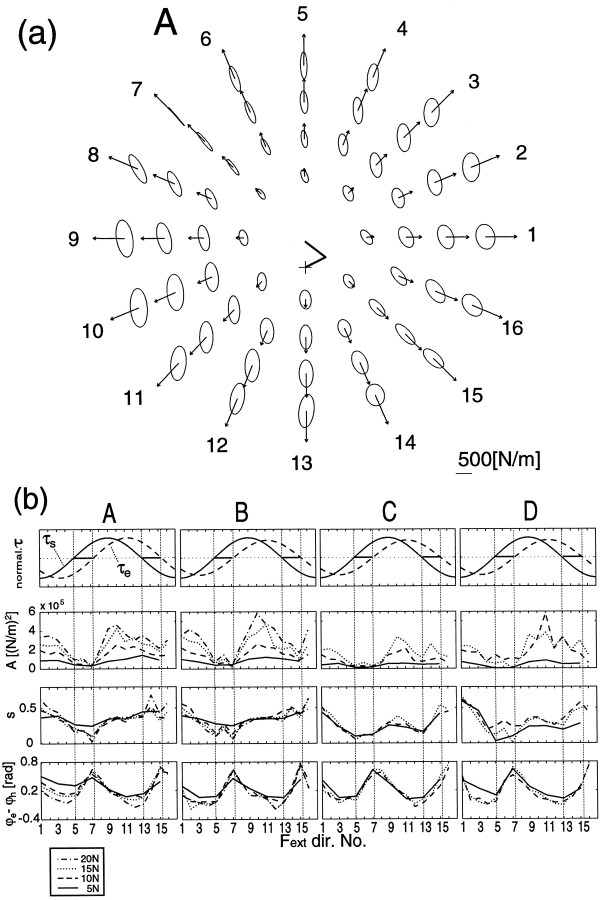
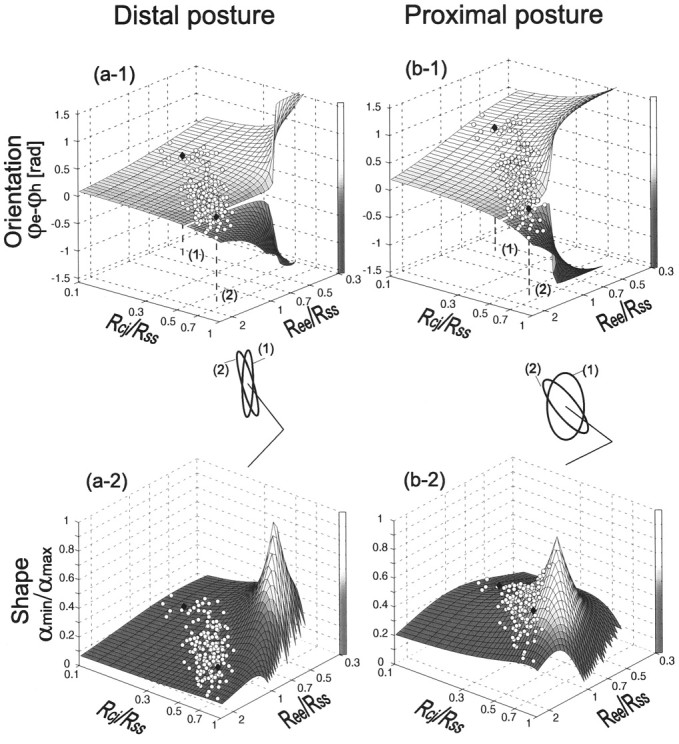
Human arm viscoelasticity is important in stabilizing posture, movement, and in interacting with objects. Viscoelastic spatial characteristics are usually indexed by the size, shape, and orientation of a hand stiffness ellipse. It is well known that arm posture is a dominant factor in determining the properties of the stiffness ellipse. However, it is still unclear how much joint stiffness can change under different conditions, and the effects of that change on the spatial characteristics of hand stiffness are poorly examined. To investigate the dexterous control mechanisms of the human arm, we studied the controllability and spatial characteristics of viscoelastic properties of human multijoint arm during different cocontractions and force interactions in various directions and amplitudes in a horizontal plane. We found that different cocontraction ratios between shoulder and elbow joints can produce changes in the shape and orientation of the stiffness ellipse, especially at proximal hand positions. During force regulation tasks we found that shoulder and elbow single-joint stiffness was each roughly proportional to the torque of its own joint, and cross-joint stiffness was correlated with elbow torque. Similar tendencies were also found in the viscosity-torque relationships. As a result of the joint stiffness changes, the orientation and shape of the stiffness ellipses varied during force regulation tasks as well. Based on these observations, we consider why we can change the ellipse characteristics especially in the proximal posture. The present results suggest that humans control directional characteristics of hand stiffness by changing joint stiffness to achieve various interactions with objects.
Figures
Similar articles
-
Multijoint muscle regulation mechanisms examined by measured human arm stiffness and EMG signals.J Neurophysiol. 1999 Apr;81(4):1458-68. doi: 10.1152/jn.1999.81.4.1458. J Neurophysiol. 1999. PMID: 10200182
-
Effects of voluntary force generation on the elastic components of endpoint stiffness.Exp Brain Res. 2001 Dec;141(3):312-23. doi: 10.1007/s002210100880. Exp Brain Res. 2001. PMID: 11715075
-
Directional tuning effects during cyclical two-joint arm movements in the horizontal plane.Exp Brain Res. 2001 Dec;141(4):471-84. doi: 10.1007/s002210100874. Epub 2001 Oct 20. Exp Brain Res. 2001. PMID: 11810141
-
General coordination of shoulder, elbow and wrist dynamics during multijoint arm movements.Exp Brain Res. 2002 Jan;142(2):163-80. doi: 10.1007/s002210100882. Epub 2001 Dec 6. Exp Brain Res. 2002. PMID: 11807572
-
Human arm stiffness characteristics during the maintenance of posture.Exp Brain Res. 1990;82(2):315-26. doi: 10.1007/BF00231251. Exp Brain Res. 1990. PMID: 2286234
Cited by
-
The influence of the indicator arm on end point distribution in proprioceptive localization with multi-joint arms.Exp Brain Res. 2012 Oct;222(1-2):77-88. doi: 10.1007/s00221-012-3196-3. Epub 2012 Jul 28. Exp Brain Res. 2012. PMID: 22842910
-
Mechanical Impedance and Its Relations to Motor Control, Limb Dynamics, and Motion Biomechanics.J Med Biol Eng. 2015;35(1):1-20. doi: 10.1007/s40846-015-0016-9. Epub 2015 Jan 27. J Med Biol Eng. 2015. PMID: 25750604 Free PMC article.
-
Quick compensatory mechanisms for tongue posture stabilization during speech production.J Neurophysiol. 2020 Jun 1;123(6):2491-2503. doi: 10.1152/jn.00756.2019. Epub 2020 May 20. J Neurophysiol. 2020. PMID: 32432505 Free PMC article.
-
Visual feedback is not necessary for the learning of novel dynamics.PLoS One. 2007 Dec 19;2(12):e1336. doi: 10.1371/journal.pone.0001336. PLoS One. 2007. PMID: 18092002 Free PMC article.
-
An Improvement of Robot Stiffness-Adaptive Skill Primitive Generalization Using the Surface Electromyography in Human-Robot Collaboration.Front Neurosci. 2021 Sep 14;15:694914. doi: 10.3389/fnins.2021.694914. eCollection 2021. Front Neurosci. 2021. PMID: 34594181 Free PMC article.
References
-
- Agarwal GC, Gottlieb GL. Compliance of the human ankle joint. Trans ASME J Biomech Eng. 1977;99:166–170.
-
- Bennett DJ, Hollerbach JM, Xu Y, Hunter IW. Time-varying stiffness of human elbow joint during cyclic voluntary movement. Exp Brain Res. 1992;88:433–442. - PubMed
-
- Bizzi E, Hogan N, Mussa-Ivaldi FA, Giszter S. Does the nervous system use equilibrium-point control to guide single and multiple joint movements? Behav Brain Sci. 1992;15:603–613. - PubMed
-
- Dolan JM, Friedman MB, Nagurka ML. Dynamic and loaded impedance components in the maintenance of human arm posture. IEEE Trans Syst Man Cybern. 1993;23:698–709.
-
- Fetz EE, Cheney PD. Postspike facilitation of forelimb muscle activity by primate corticomotoneuronal cells. J Neurophysiol. 1980;44:751–772. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials